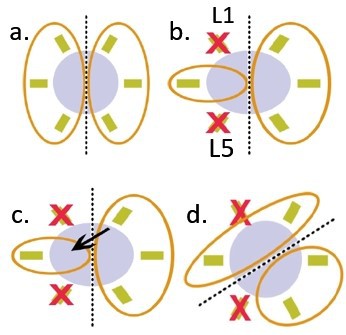
In future, a biologically inspired self-configuration algorithm may be implemented for the cases where the robot losses one or more of its legs. Swarm Intelligence based robot reconfiguration (SIRR) method is delivered in [17]. An example is given in Figure 6.1 where hexapod reconfigures itself as a quadruped after losing Legs 1 and 5.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.