In the following, I would like to outline how transparent polygon scanning can be used to save lives. I again aim to create prior art to extend the freedom of use of transparent polygon scanning.
Figure 2 (from Wikipedia).
Typical optical setup of single point OCT. Scanning the light beam on the sample enables non-invasive cross-sectional imaging up to 3 mm in depth with micrometer resolution
Optical Coherence Tomography (OCT) is an imaging technique that uses low-coherence light to measure samples based upon the principle of light interference. It is used in the medical industry to detect cancer in tissues and diseases in eyes, e.g. the Cylite of Hewlett Packard. OCT is typically used to obtain information from a sample. In 3D printing it has been used to verify a print. For example, Photoncontrol used Optical Coherence Tomography and Raman spectroscopy to test the quality of bio-printed tissue, see 1. A startup, called Inkbit from MIT, is using it to create samples accurately. They print droplets with an inkjet head and then verify the position of these droplets using among others OCT. OCT has also been used to detect the adhesion between layers in a 3D printing process, see Non-destructive testing of layer-to-layer fusion of a 3D print using ultrahigh resolution optical coherence tomography. Due to the interest in this area, I decided to elaborate upon how OCT can be used in combination with a transparent polygon scanner. I claim that in figure 2 a transparent polygon scanner is used instead of a galvo scanner. I claim that in the optical path of the Hexastorm a beam splitter is placed after the aspherical lens and before the first cylindrical lens to enable the scanner for optical coherence tomography. I claim the use of a transparent polygon scanner for wavefront measurement in Ophthalmology and Optometry. The vertical measure of an eye ball, generally less than the horizontal, is about 24 mm. The current scan head has a scanline of maximum 24 mm, making it already close to dimensions required for eye ball measurement. I claim that possibly two transparent polygon scanners are used in ophthalmology and optometry, to move the bundle in two directions. An OCT enabled transparent polygon scanner might also be useful for 3D printing. Imagine that a small percentage of the bundle is scattered to the reference mirror and most of it used to go to the sample. It will then be possible to sinter powders or polymerize liquids at the sample location. A small portion of the beam will be reflected and refract back to the beam splitter and interfere with the reference beam at the photo-detector. This allows one to measure the photo-polymerization or sintering process during printing. I can imagine this is especially useful if the layer height is less than the wavelength. I can also imagine that this is useful during a process akin to Hexaforming (see previous post). A hand held device could be used to check the skin of a patient. An application would be laser surgery, such as eye surgery (Carl Zeiss Meditech) or tattoo removal and laser hair removal. The transparent polygon scanner could also be useful in a Raman microscope as galvo's are used by NanoPhoton. In two-photon point-scanning microscopy,temporal focussing can be used to increase the image rate for a transparent polygon scanner similar to a galvo setup. Another option is in vivo imaging with HiLo microscropy but then a transparent polygon scanner. Further possibility is Field-portable quantitive lenssless microscopy based on translated speckle illumation on sub-sampled ptychographic phase retrieve using a transparent polygon scanner. Or A New Method of Creating High-Temperature Speckle Patterns and Its Application in the Determination of the High-Temperature Mechanical Properties of Metals with a transparent polygon scanner. Another option is laser scanning fluorence microscopy with a transparent polygon scanner instead of a scanning mirror. The dichroic mirror could be positioned between the first cylinder lens and the aspherical lens. If a pinhole is added before the camera, we have just created a transparent polygon scanning confocal microscope, see video.
Recently, Carbon's 3D valuation exceeded 2.4 billion USD . I must admit that I personally think the process is a breakthrough, a real innovation. This provided me with inspiration to again look at its intellectual property and create prior art to facilate circumventions of its patent. Carbon has a technique which it denotes as Continuous Liquid Interface Processing (CLIP) . Carbon uses a Digital Micro-mirror Device (DMD) to illuminate a photopolymer through an oxygen-permeable window made of a fluorpolymer such as Teflon AF. Teflon AF can be sourced from Biogeneral . Nasa described how a teflon AF sheet can be made. A supplier of chemicals can be found here . The permeation of oxygen through the window creates a persistent liquid interface, nicknamed "dead zone", where photopolymerization is inhibited between the window and the polymerizing part. Oxygen inhibition was an effect that was already shown to play a role by Denkari et al. in 2006 for silicon release coating invented by John Hendrik, see US7052263 (B2) . The "dead zone" in silicone release coating is so small that a peeling is needed to release the part from the transparent window. Hessel Maaldrink sped up the process by adding a force feedback sensor EP2043845B1 . Using Teflon AF and a polyuerethane Tumbleston et al. 2015 where able to extend the "dead zone" to approximately 30 micrometers. As such the part does not have to be peeled of from the optical window during the process and stair stepping is minimized. This allows for the production of flexible parts. Furthermore, the "dead zone" speeds up the viscous flow between two parallel plates, part and window, for the application of a new layer, see WO2014126837A2 , improving the print speed. Carbon filed two patents title 'Continuous liquid interphase printing' and 'Method and apparatus for three-dimensional fabrication with feed through carrier. The analysis is mainly targeted at Continious liquid interphase printing but broadly remains valid. I will now try to create prior art and formulate a work around for the Carbon patent to extend the freedom of application of the transparent polygon scanner marketed as Hexastorm. After studying the WO application of CLIP, I noticed that the European patent is different from the US patent. In the European patent EP2956823B1 claim one states ".. irradiating said build region through said optically transparent member to form a solid polymer from said polymerizable liquid while also concurrently advancing carrier away ..". As such, I claim irradiating said build region with for example a transparent polygon scanner while not concurrently advancing away the part, but discretely. The part is exposed and moves after a full exposure. Moving during an exposure is also not possible as Hexastorm exposes a line and not a plane. DMDs have a pattern/pixel rate of up to 20 kHz. Laser diodes can achieve a refresh rate up to 100 MHz. At 50.000 RPM and six sides, a transparent polygon scanner exposes at line rates of 5000 Hz. With a laser diode, the refresh rate is so much higher that it might be possible to alter the polymerization over much smaller distances. Stair stepping would be minimized even though the part is moved discretely. If it is not possible, the procedure would still allow for the production of flexible parts. The US patent, US 9216546B2, is wider in scope as claim one specifies "A method of forming a three-dimensional object, comprising the steps ...". The formulation using "steps" in US patent differs from "concurrently" in the European patent.
In the US the process is also under patent if the part is not moved during exposure.
Carbon as a result markets its technology as "digital light synthesis technology", although Continuous Liquid Interface Processing (CLIP) seems more accurate in the European union. Key in the US patent is that parts are produced upside down and moved away from a build surface which is not air. This is peculiar as the original patent by Hull in 1986 specifies both up and down projection in figure 3 and 4 respectively. As such, I claim the use of oxygen-inhibition in down projection, where the top is up, using a transparent polygon scanner. Again, the fast exposure of a laser diode might minimize stair stepping and the "dead zone" will simplify coating. Additionally, using air instead of a teflon AF layer reduces costs. After studying the following literature, dip and blade coating patent US5651934 of Charles Hull, flows in thin film coating by Christian Kushel, Zerphyr coating as described in US6159311, curtain coating as described in EP0928242 and the book Liquid Film coating by Kistler, I claim the following. 1. Firstly, the use of "dead zone" in 3D printing to facilitate the coating of liquids in down projection photo-polymerization where the top of the part is up. I will now explain this. Boundary conditions during coating are important. A part solidified up to air provides a non-consistent liquid // solid boundary condition. During for example blade coating the coater can collide with the part. A dead-zone would prevent this and create a more consisting wetting of the substrate during for example Zephyr coating as it is entirely liquid. 2. Secondly, I claim that an array of transparent polygon scanners is integrated in the Zephyr blade. I claim that possibly in the Zephyr blade a Teflon AF film is partly applied between the liquid and air interface. I claim that in the Zephyr blade the pressure of the air is monitored. I claim that an opening is provided to actively supply liquid to the Zephyr blade using a pumping mechanism. 3. Thirdly, I claim that the teflon AF film or part moves parallel to the plane of illumination and not only orthogonal as in the CLIP patent. Transfer substrates are used by Admatec , Carima and TNO EP2272653. Especially, I look at the figure provided at the front page of US2012007287. I claim that the film in this figure denoted by 10 is teflon AF and the exposure module denoted by 9 is an array of transparent polygon scanners. I label the process which fall under my claims and not under Carbon's claims as Hexaforming.
The proof of concept module was hard to build. I used shims of 100 micrometers and a tweezer to set the height of the laser. In the next module the build procedure is simplified so it is easier to scale the amount of single bundle transparent polygon scanners in the world from 1 to 10, and make a 10x improvement. The procedure is as follows; turn the the laser diode so long axis is parallel with prism, set height laser, set height diode, focus laser by positioning first cylindrical lens. Other components still need to be added an whole system needs testing. The current alignment setup cannot correct for the offset of the horizontal offset of the laser diode. This is a problem as the production of the laser housings is not consistent.
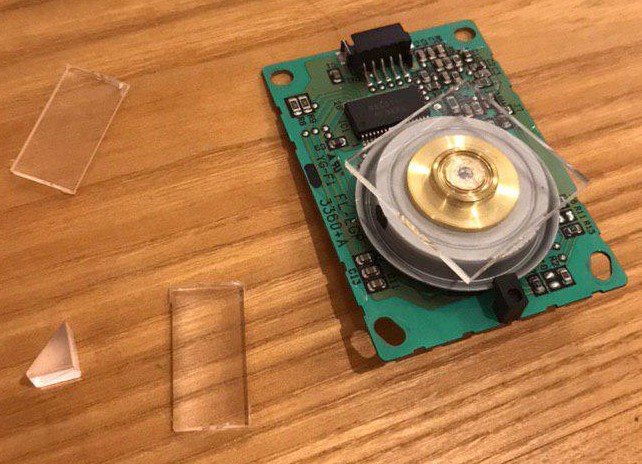
I want to simplify the fabrication of a scan head. I disassembled the head so I could reuse the components. A colleague advised me to glue the lenses with CAF3 (silicon glue) to the plastic posts. This was good advice, lenses were very easy to take off. I was worried that i had to order the components anew.
Components are ready for the next iteration. Some remaining glue can still be seen.
As always, I would like to generate some prior art to extend room of operation. The following concerns the situation that multiple scan heads are used in a single machine. For an example see Kleo which uses 288 bundles by Carl Zeiss.
If multiple scan heads are used, a challenge is to align these heads. The position of the laser in each head has to be known exactly. One way of doing this is by moving a camera under the scan heads and collecting position information per laser. The laser would project directly onto the CCD / CMOS chip and its position would be determined. This is however expensive as it requires an extra stage with camera. The chip has a finite size of for example 5x5 mm and has to be moved.
Another solution of doing this would be to add a bar from diffuse glass, e.g. opal glass. The light would be scattered in this bar and reach the edges of it. At the edge of this bar there would be a photodiode. The bar could be made of opal glass. One might think that this bar must be narrow so the position can be detected up to 10 micrometers accurate in one direction. The current photodiode used to calibrate the laser is, however, also not narrow. You can simply use the rising edge of the signal recorded by the photo-diode used to monitor the diffuse opal bar. The stage upon which the scan head is mounted then moves in orthogonal direction to this bar. By turning on the laser and moving it over the bar. The position can be determined exactly in that direction. It might be needed to add a cap-around the bar to minimize stray light. This is also done for the photo-diode in the scanhead. Still, I need two dimensional information. I also need to know the position of the laser diode at the bar. To do this I could use multiple photodiodes along edges of the bar. They would all measure a signal if the laser hits the bar. The signals will, however, arrive at different points in time. This allows one to determine the position of the laser along the bar.
I have uploaded the current designs of the Hexastorm to hexastorm design. The project goal has also been slightly altered. The current focus is to develop a scanhead which can be sold for R&D purposes. This scanhead in combination with the Firestarter cape and software would then be the MVP. The first target customers are R&D institutes, technical enthusiasts or corporates active in for example the field of 3D printing and PCB manufacturing. My current target is entities incorporated as business. The advantage of business customers is that they don't have to pay income tax before the purchase of scanhead and often can deduct value added tax. This can easily save you up to 60 percent in price in countries like the Netherlands, as VAT is 21 percent and income tax is around 52 percent. In the Netherlands you also have the change of multiple subsidies like WBSO. Imaging technologies are seen as a "key technology" which makes you applicable for all kinds of grants / collaborations.
Good news! I have been able to test the Firestarter V2 board and most functionality works (still have to test the laser/photodiode but don't expect trouble here). Progress was slow as I had to port the TMC2130 Arduino library to the Beaglebone. You can find the ported library here, it works. A challenge was that with multiple SPI devices you have to acknowledge a command by setting and clearing the chip select pin. Although obvious, this took me quite some time as it was done automatically for the default chip select pin and I did not have the right settings which made it a confusing bug.
I left the laser scanner in the car during day hours. The car became so hot that the PLA became more flexible and the scanhead started to warp. It could be that the laser is still aligned as the plate was reinforced with a metal bar but it doens't look good. I started a fork of BeagleG for the Firestarter V2 board. Making the board ready for BeagleG seems quite easy. I hope to finish testing soon and will then commit it back to the main branch.
The Firestarter V2 will then be able to run two firmwares; BeagleG and my Python fork of LDgraphy. This will bring me a lot closer to start making PCBs with a spindle and the Hexastorm :-).
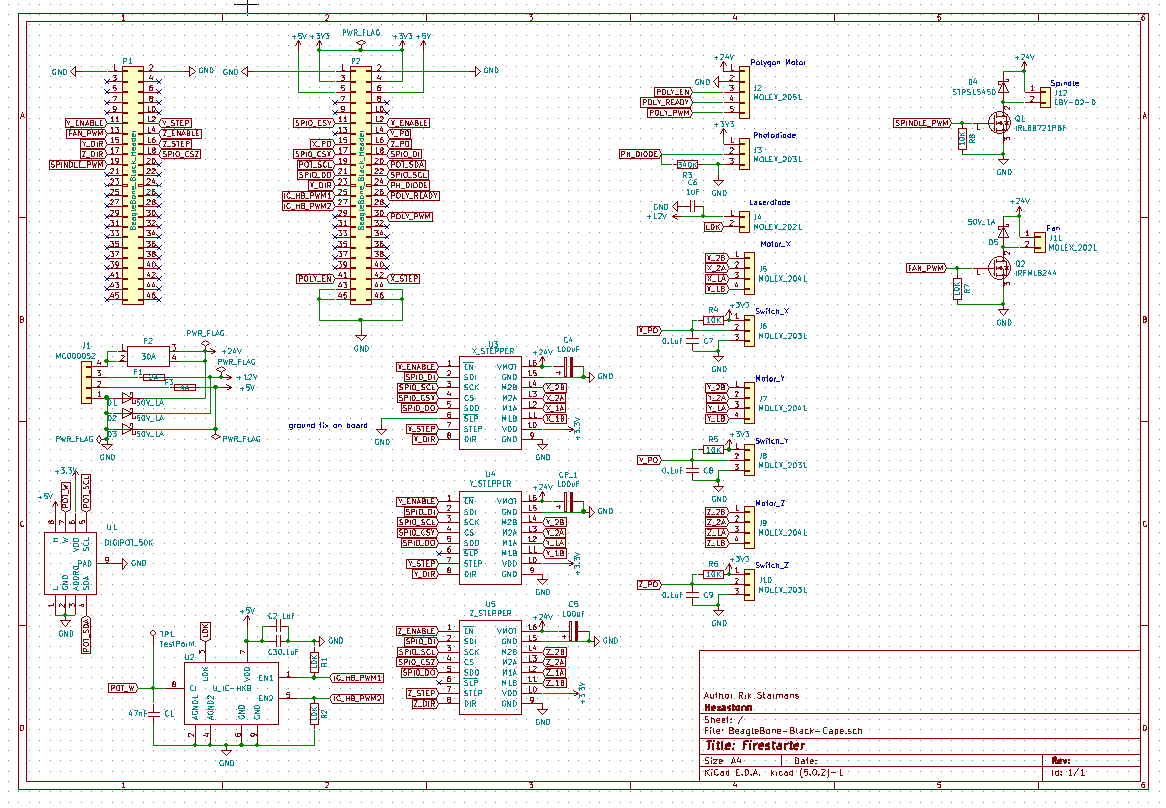
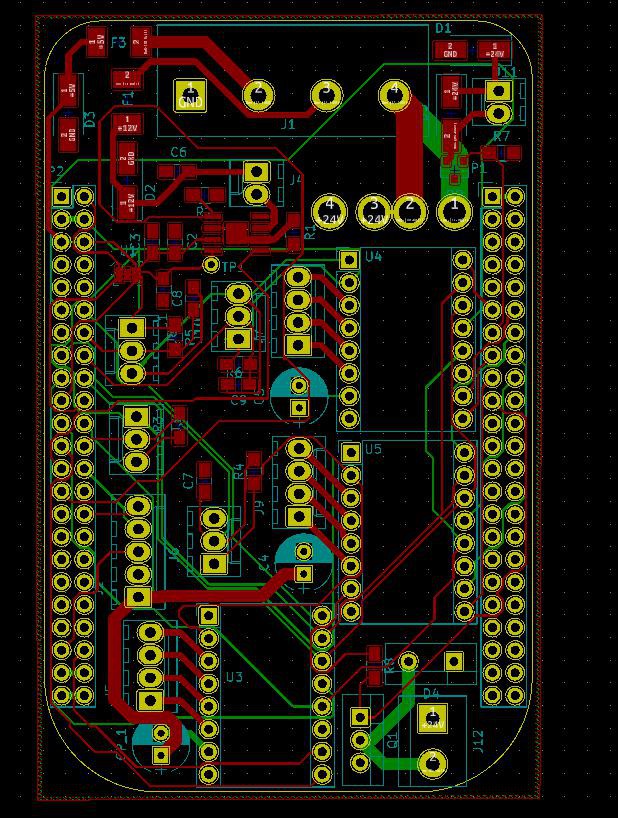
I finished the routing of the new Firestarter Cape;
The cape has the following improvements;
PWM control of spindle and fan
added spindle
TMC2130 motors can now be configured via SPI
added third stepper motor for z-axis.
board is now made with Kicad and not Altium.
hdmi pins are free, screen can be added
The current board can be used for 3D printing. Although, you might want to add a tilt motor, recoat motor and temperature control for your resin. Some machines use force-feedback, which is patented.
The boards still have to go through some final checks, probably you can't run 30A through the board.
 Hexastorm
Hexastorm



{kind=link}