As software development is slow going, I thought I'd spend some time completing the hardware component of the project to improve morale. The plan is to make the circuit (below) as small as possible, 3D print a case, and have a working prototype that I can pass around to collaborators to wrap up the software element. I have located components with SMD footprints for the charging, DC-DC boost, and instrumentation amplifier,
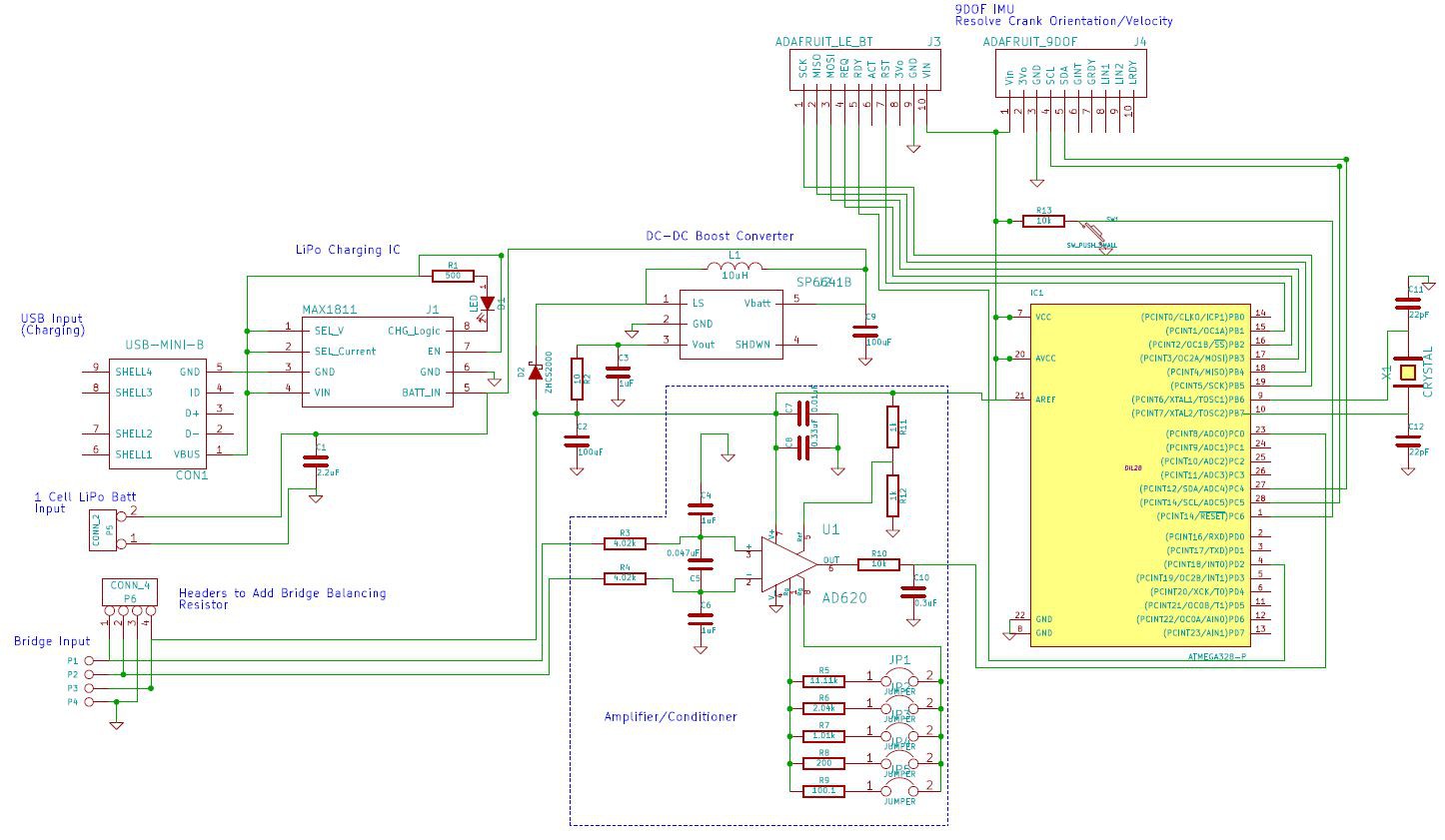
and plan on getting boards made soon through OSHpark. Incorporating the bluetooth and 9DOF IMU elements are out of my comfort zone, so I'll rely on the Adafruit breakout boards. This is not ideal, but I'm confident that the final device size will be acceptable.
My biggest assumption moving forward is that the 9DOF IMU will provide orientation/rotational velocity feedback accurate enough to meet my requirements. I had planned on using a reed switch on the crank arm to serve as a fiducial for correcting orientation. I will rely on testing to determine if additional input is necessary, or if the 9DOF IMU will be sufficient.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.