 Guillermo Herrera-Arcos
Guillermo Herrera-ArcosAfter some tests with the Knee of our exoskeleton, we have assembled the two legs and implemented the electronics on them. We have put most of the the micrcontrollers, drivers and cables on the exterior of the exoskeleton, for better user's ergonomy and comfort.
This is me, figuring out how to put all the electronics:
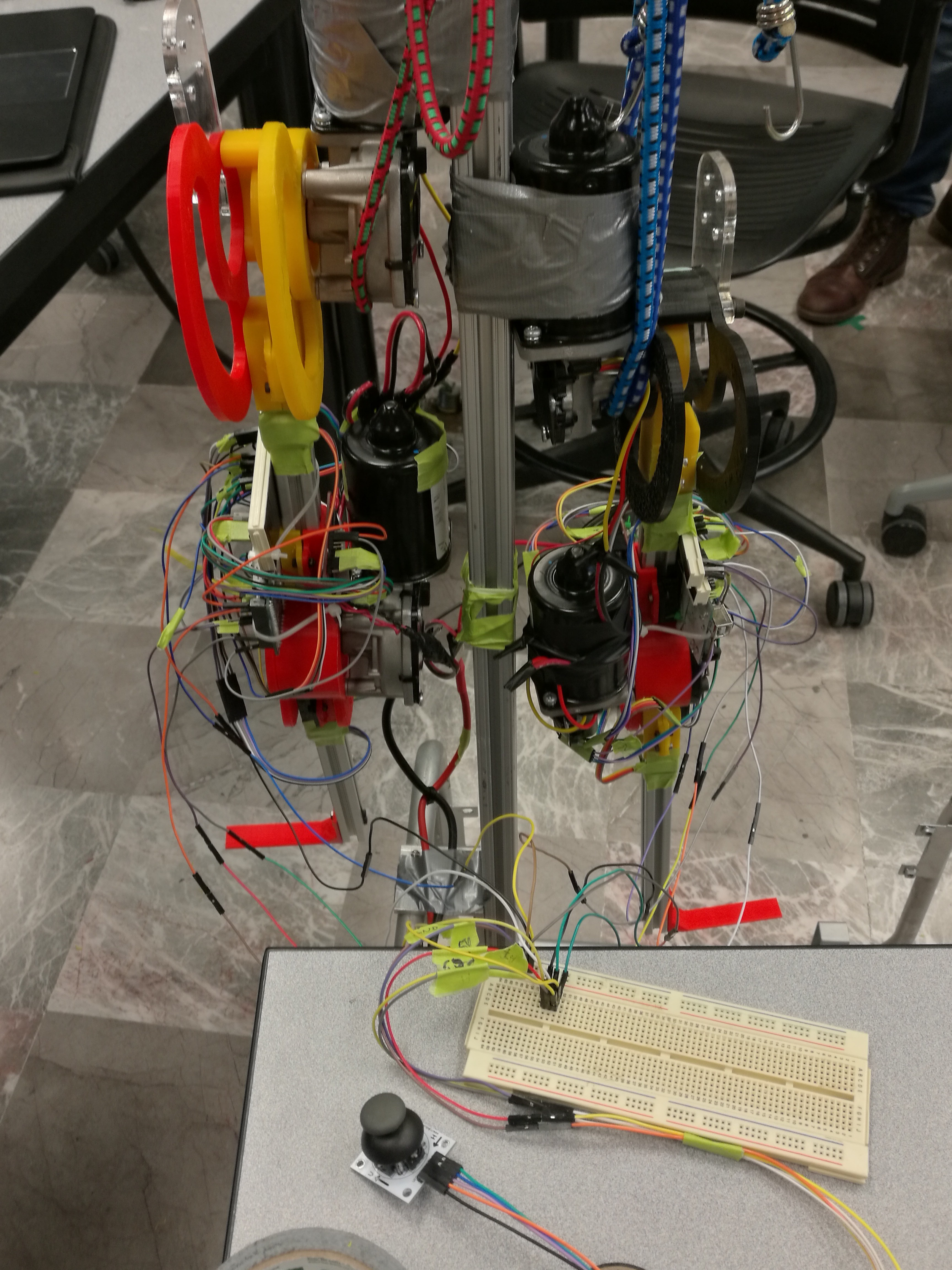
Now, our prototype looks like this:
We have started the tests regarding the two-legged locomotion. Soon, we will share our progress.
We are very happy and proud to announce that our Exo was one of the 20 finalists in the Wheels, Wings and Walkers portionf of the Hackaday Prize. We sill continue working to open new opportunities for the people in need of these devices.
Thanks for reading.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.