 Guillermo Herrera-Arcos
Guillermo Herrera-ArcosWe are very excited to share our progress. After we finished the wood stand for our robot, we started working in the control algorithm. I'll explain briefly how the algorithm works; the algorithms it's based on a 4-state machine and it's an accelerometer-based algorithm, meaning that when certain position is achieved by the leg, the algorithms knows the position and executes the next state. The 4 states described in our algorithm, are based on the Perry gait model (http://ieeexplore.ieee.org/document/7287961/).
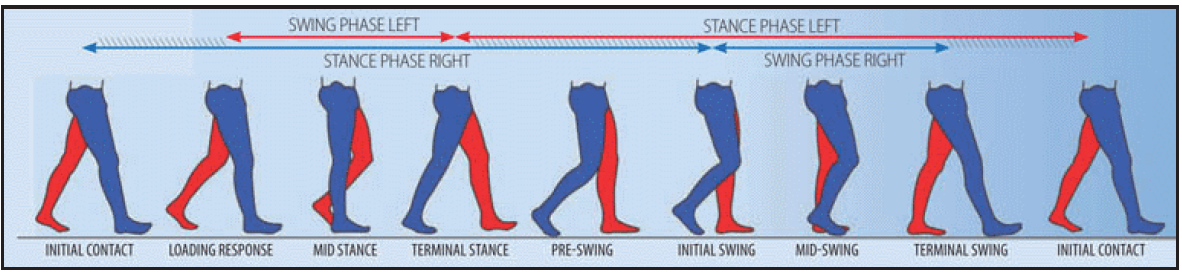
In this video, you can appreciate how the microcontroller reads the accelerations and executes the next state only if the desired position is achieved by the leg.
Once the arduino codes are finished and documented, I'll post all of them on my github.
Now, we'll be working in the two-legged locomotion algorithm.
Thanks for reading.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.