 David Brown
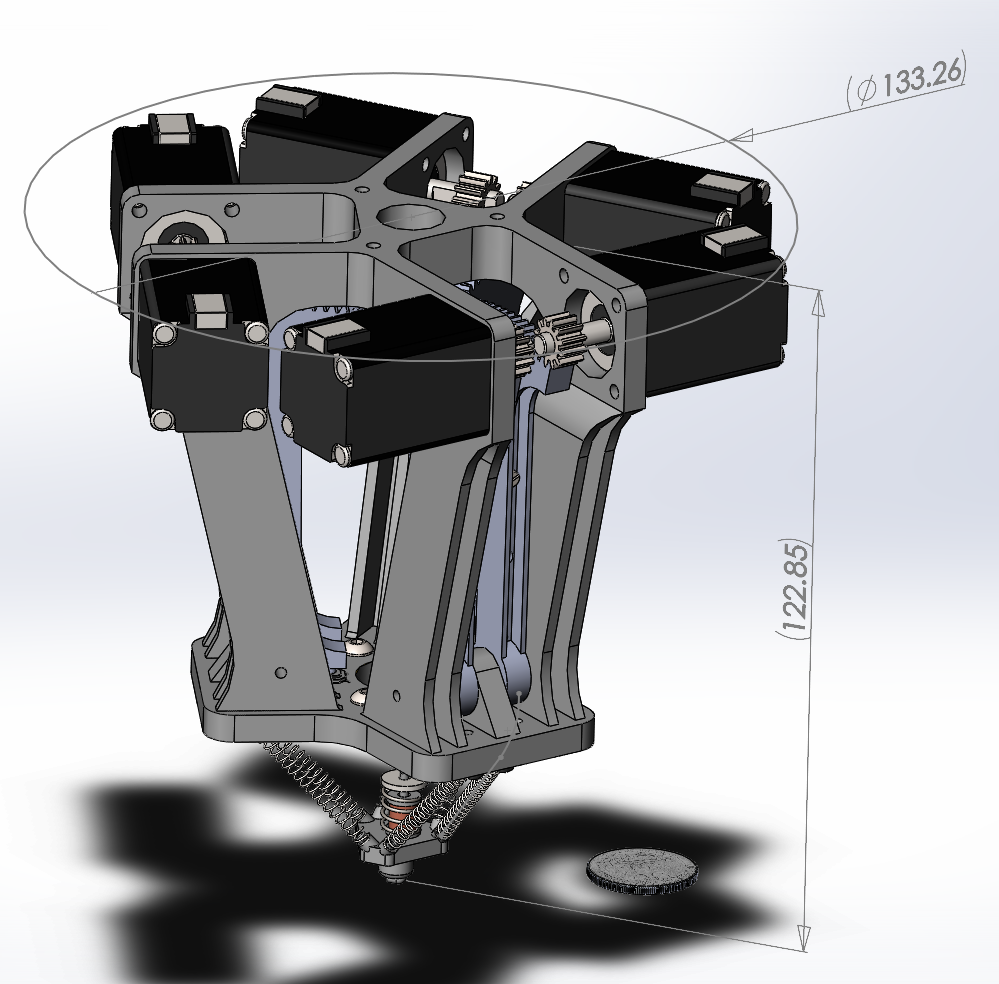
David BrownSo after a few iterations of re-design to work with NEMA-8 sized stepper motors which whilst not the smallest available are the smallest in the sub $20 bracket. In this case $12ea.
With the increased size comes the headach of deciding on an arrangment to pack them as close together whislt having a viable mechanism to allow the small dislacement and high resolution with minimal backlash possible. More after the break below...
 units = mm
units = mm
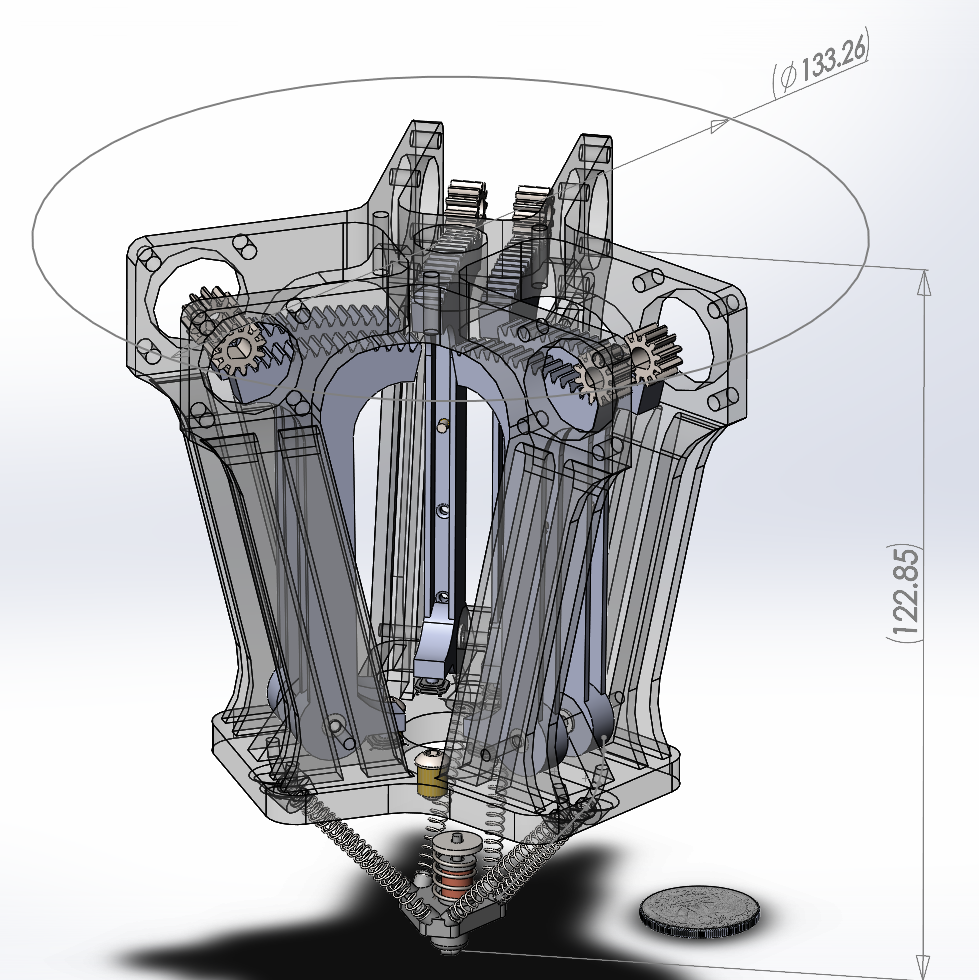
The design i've ended up with is an arrangement of small gear on the motor driving a large gear, with a fine wire wrapped around a small hub. As the gear rotates the wire is pulled or released off the hub. In this case the large gear takes the form of a leaver with only a small section of the total circumference. As can be seen in the section below;
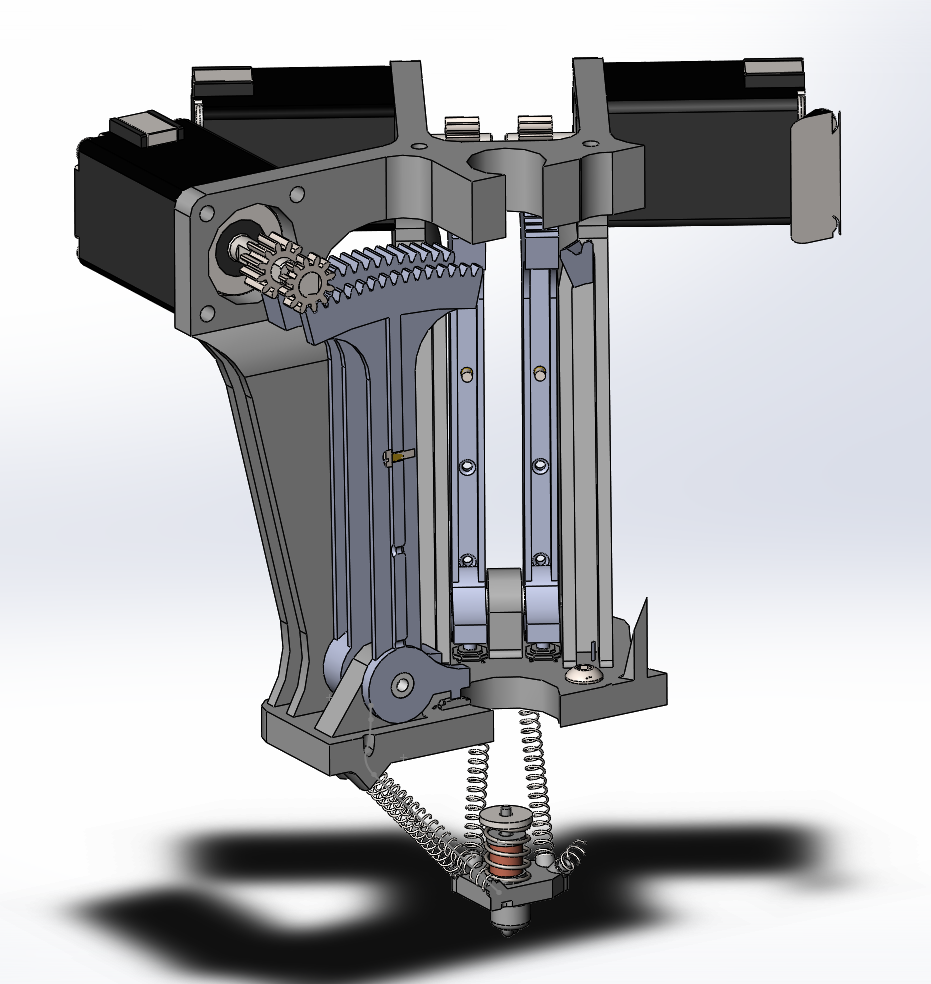
The 0.5mm wire passes through a PTFE tube through the base and down the centre of the leg spring to the actuator platform. Beacause the overall displacement is small there should not be issues with not having discrete universal joints at the ends of the actuator legs (springs). The wires are tensioned and held in position by the small screw placed in the lever web.
At the centre near the base there is a PCB with six push button switches that allow the levers to be set to a known home position at startup.
Whilst the whole assembly is substantially larger than my initial plans, i'm hopeful that with its more robust design that there will be fewer teething issues. The resulting actuator head still occupies the same volume as the initial design.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Won't temperature changes affect this a lot? I suppose both the wire and the springs would behave differently in different temperatures?
Are you sure? yes | no
I was just sitting here considering what you said. I would imagine it would indeed effect it at this scale of movement. But in all the use cases I'm thinking of it really shouldn't matter. They would all be in a controlled environment indoors, with similar temps all the time.
Are you sure? yes | no
As Douglas notes, yes at different temperatures you will get changes in the lengths of the components, but in a controlled indoor environment the range should be minimal. This is one of the trade-offs in the design.
I have the option to monitor the temperature and to compensate for it in the control software. I'm going to use a RUMBA controller board [http://www.reprap.org/wiki/RUMBA] as it has the x6 stepper controllers needed and a reasonable ATMega MCU, but also analogue and digital inputs.
It would also be possible to engineer a compensation system where a high thermal expansion element, say aluminium is used on the non moving section of the wire. Which is an approach to take for mechanisms without electronic control, combining them would be counter productive and require a complex model for the electronic side.
Are you sure? yes | no