 Radu Motisan
Radu MotisanThe project takes advantage of the great movement agility of a quadcopter in 3D space, to measure various environmental parameters. Here is a demo video:
The major components of the construction are:
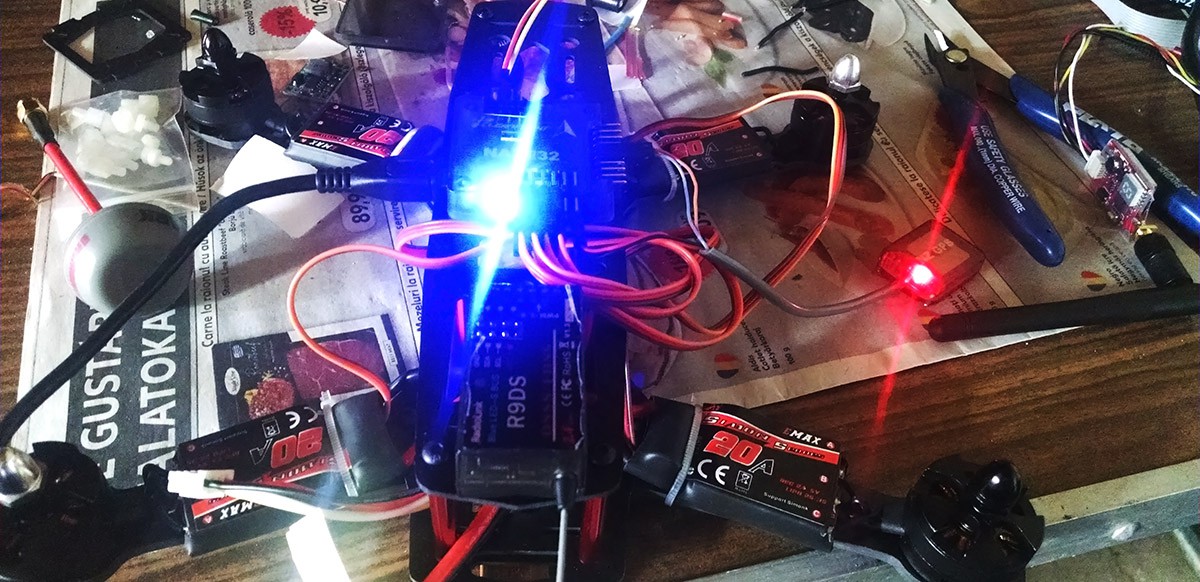
1. Quadcopter platform
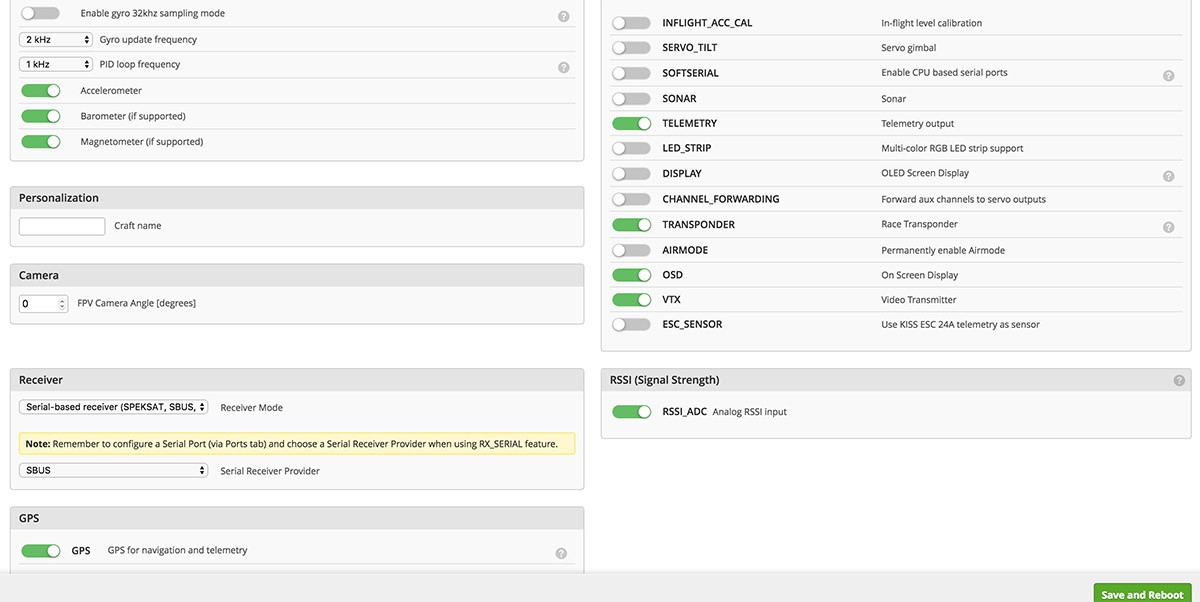
This is the flying unit itself, and needs to offer good stability, high autonomy and long radio link for flight control and data exchange. One option is smart onboard flight control software, for semi-autonomous decisions and return to base failsafe mechanisms. To be able to complete the work in a reasonable amount of time, the options here will be simplified.
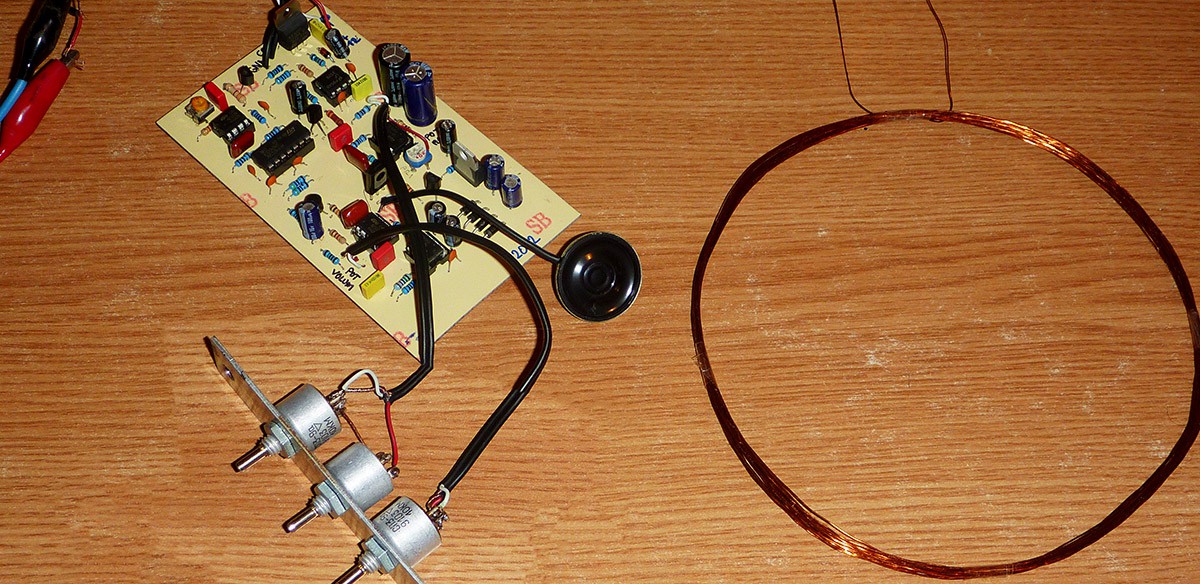
2.Sensor array
Several air quality sensors, including electrochemical sensors to measure various gases responsible for pollution, that can impact the environment or the human health
3.Data link
A way of storing data or a radio link system to return the readings to base in real time. Values must be paired with GPS coordinates.
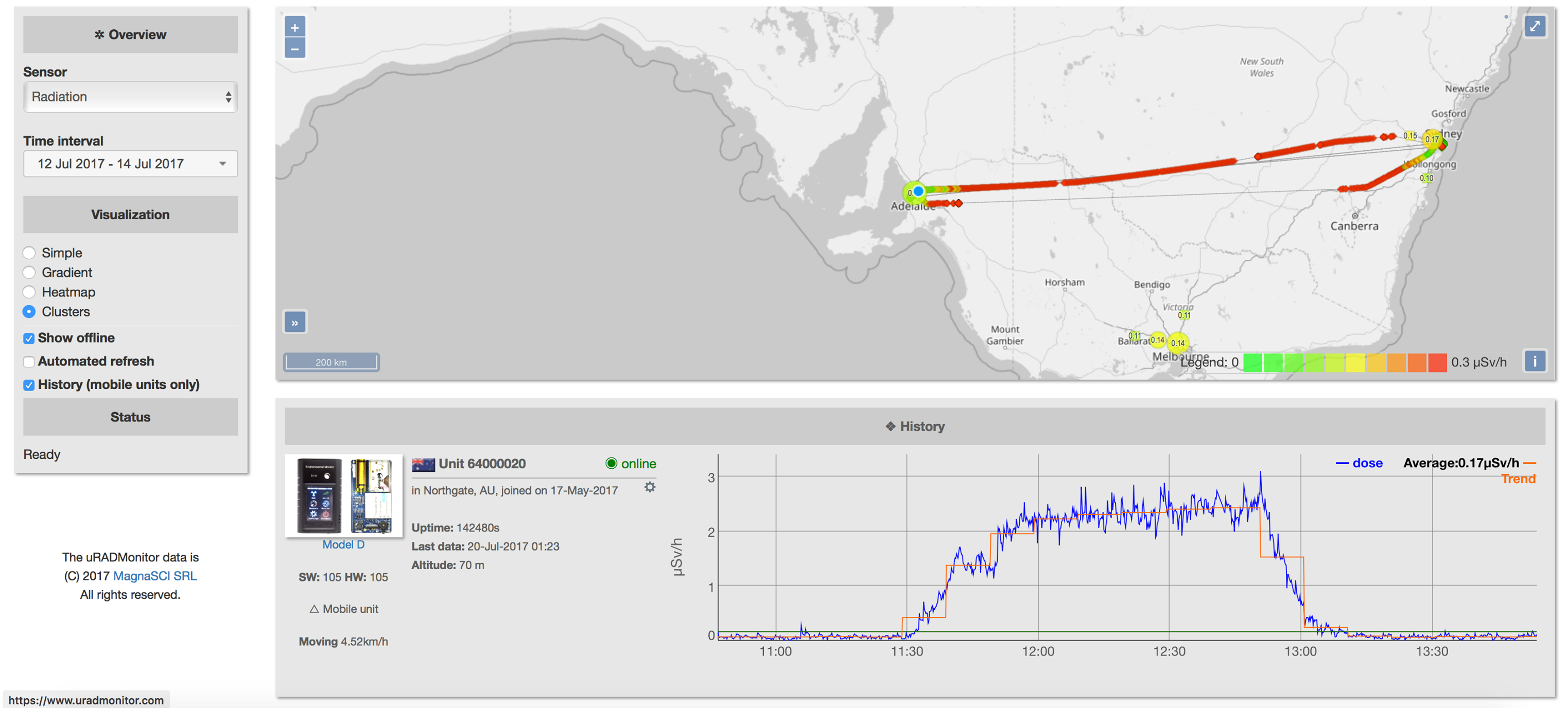
4.Server backend and GIS frontend
A way to store and visualise the data collected by the system. Ideally this should be integrated with the flight control software, to allow covering the zones of interest automatically.
For the quadcopter I went for a ZMR250 unit, it is low cost and very hackable. One disadvantage is this is a racing drone. For the sensor array I will design a separate board with low power sensors adding as many of them as possible while keeping the battery life high. The Data link should be a serial modem with at least 2km of range in open space, but if that won't be possible, I'll be either using LORA or store the readings on board on an SDCARD. The server backend will be the uRADMonitor server, developed since the # Global radiation monitoring network project.






 Hope to do a first flight soon.
Hope to do a first flight soon.


 YJ
YJ
 Samuel Wantman
Samuel Wantman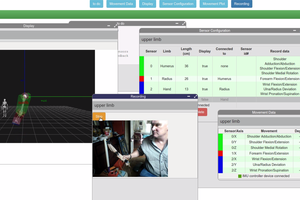
 Jonathan Kelly
Jonathan Kelly
 Makerfabs
Makerfabs