 Alex Karadimos
Alex KaradimosAfter the first trivial proof of concept I started working on a proof of concept with bigger dimensions and better electronics. I still didn't use any expensive aluminum hardware as I didn't have a final design for my robot.
Components:
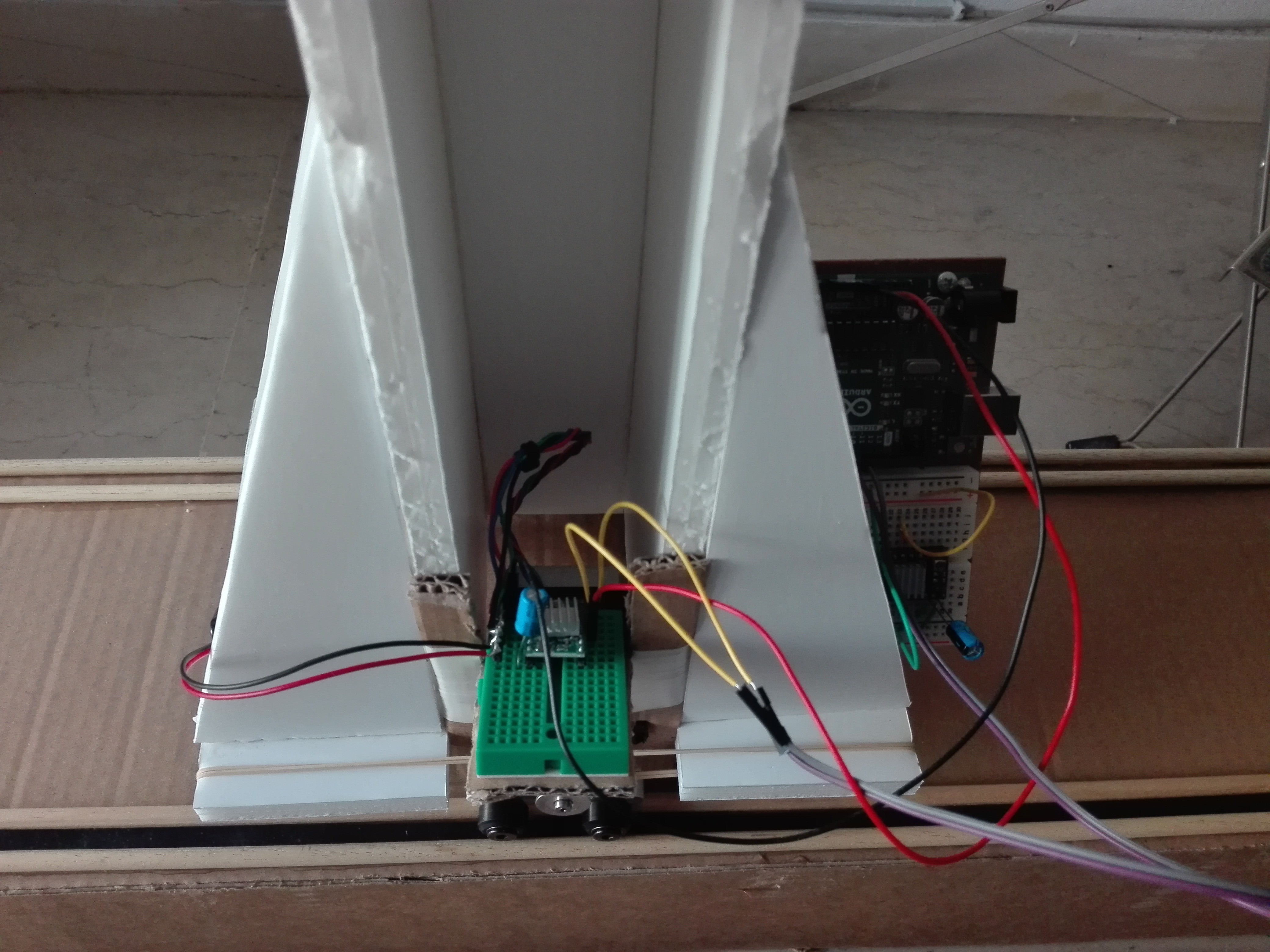
- cheap materials (cardboard and wood)
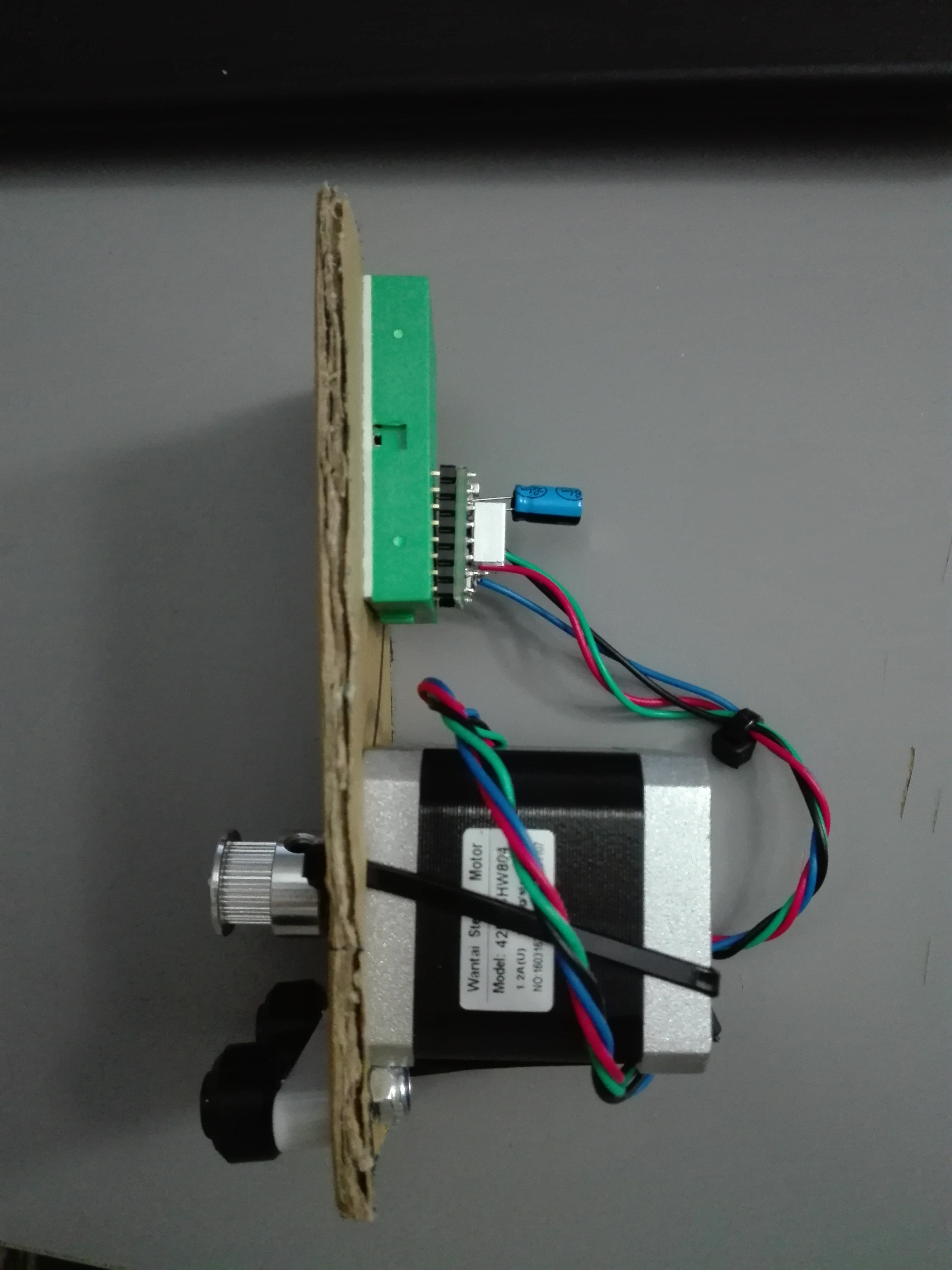
- 4 NEMA 17 stepper motors
- 4 DRV8825 Stepper Motor Drivers
- timing belts & pulleys (GT2)
- v-wheels
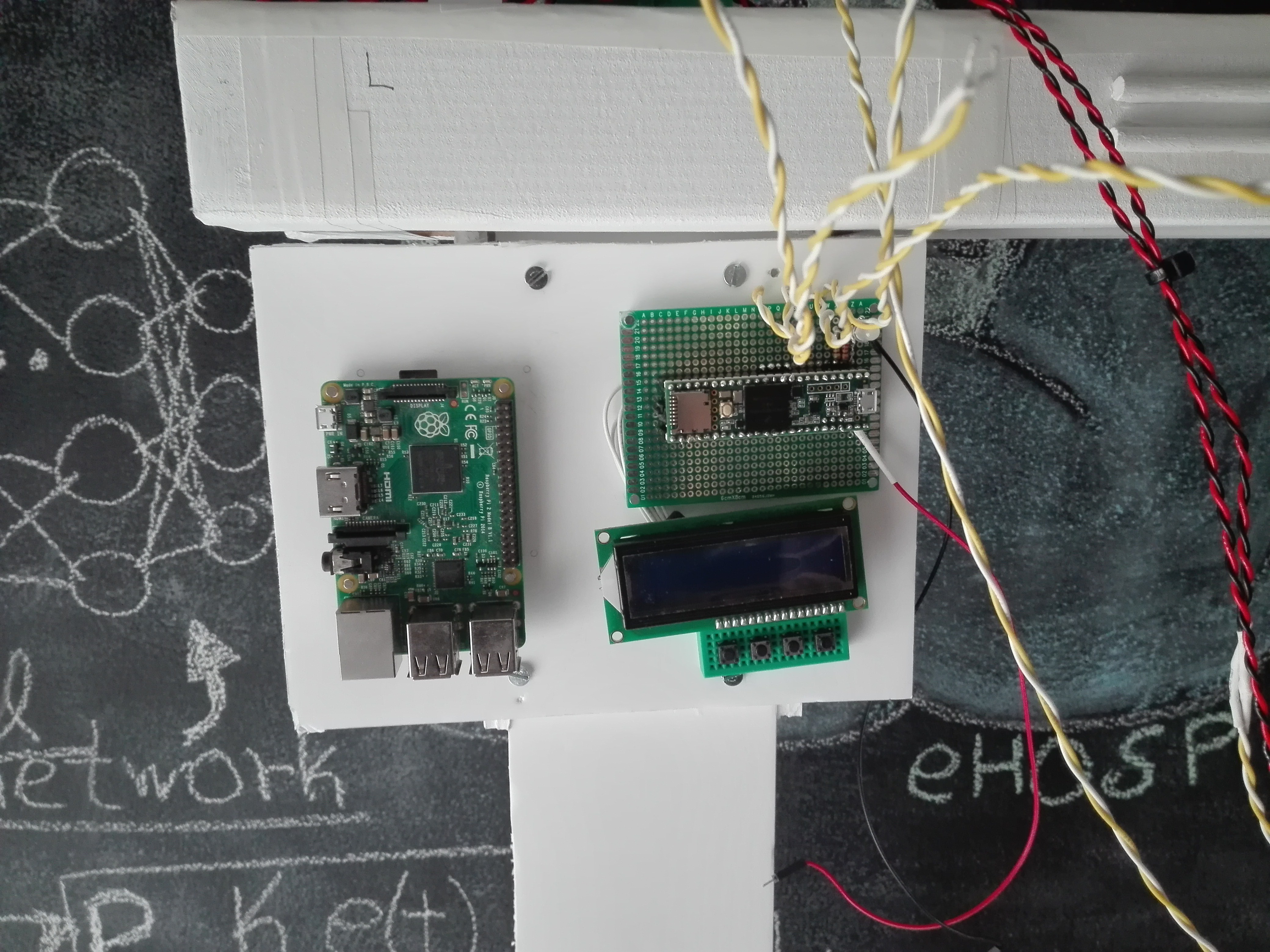
- Teensy 3.5
- Raspberry Pi 2 Model B
- Power Supply 12V 8.5A 102W
- Precision shaft & Lead Screw T8 1000mm
- Cables, resistors, buttons, switches, capacitors and prototyping boards

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.