 Alex Karadimos
Alex KaradimosWriting simple code to test the 3 axes of the system to simulate a 3D cartesian moving system (like a CNC).
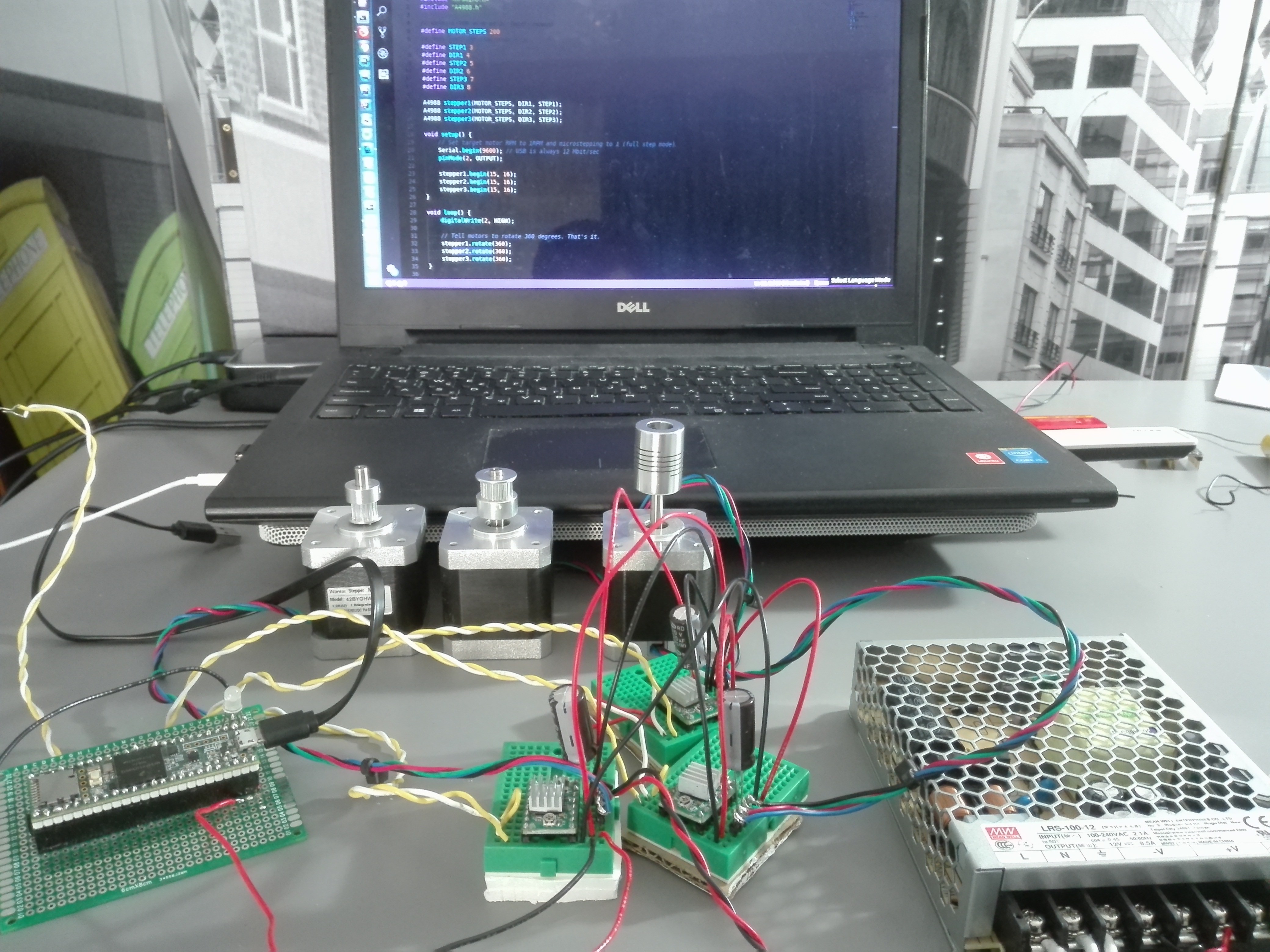
List of components:
- Teensy 3.5
- 3 NEMA 17 Stepper Motors (200 steps/rev)
- 3 A4988 motor drivers
- 12V 8.5A power supply
- 3 100µF electrolytic capacitors
Next step is to control 6 stepper motors at the same time, with a more complicated algorithm to compute the Inverse kinematics of a 6 DOF system. For that I am going to use the rosserial_arduino package, for using ROS with Arduino.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.