 Alex Karadimos
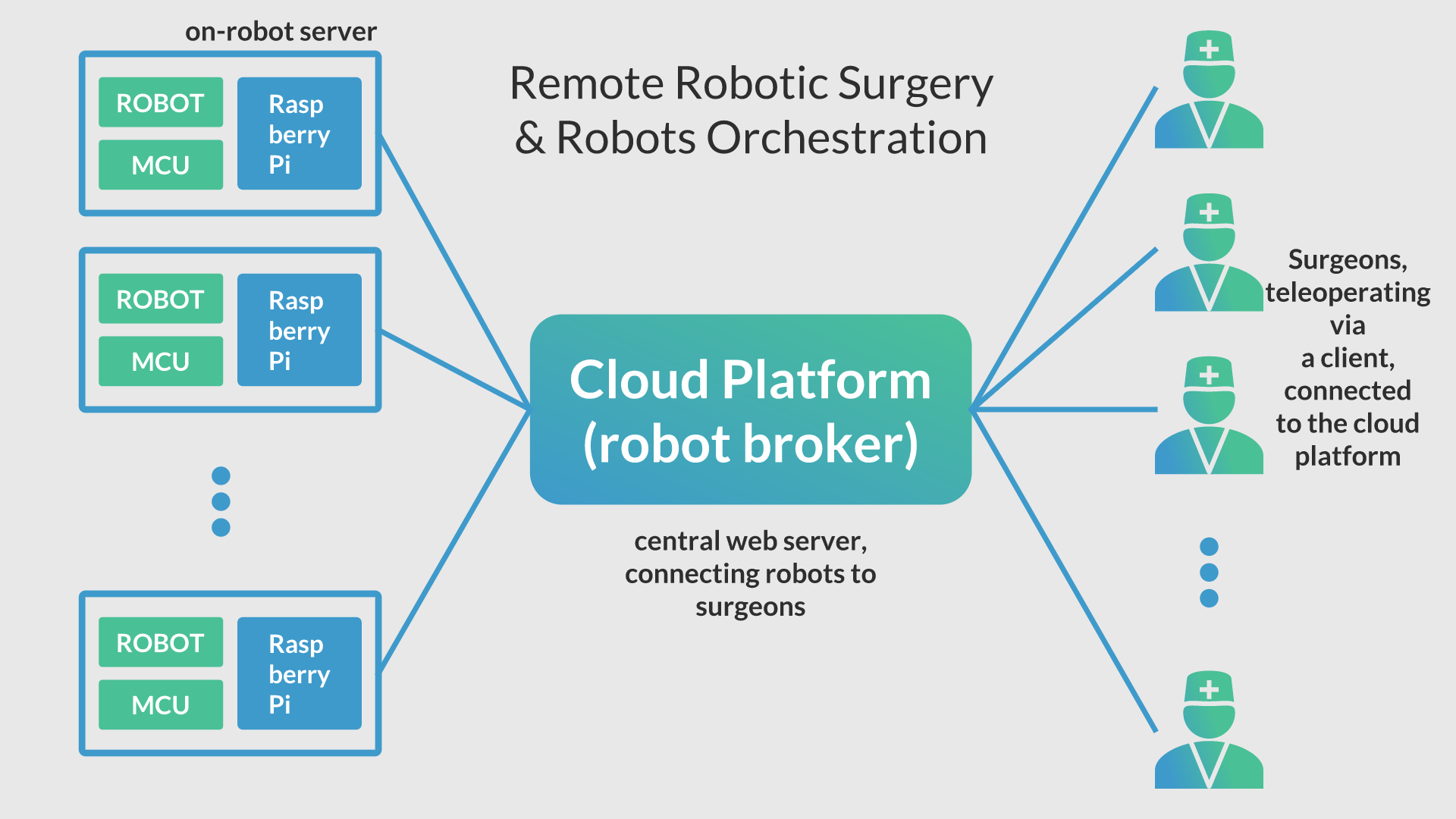
Alex KaradimosThe following diagram illustrates how multiple robotic platforms will be used remotely.
Each robot has a Micro-controller (MCU) and a Raspberry Pi on which there are installed all ROS libraries and code for the micro-controller as well as a small server which communicates with a central server (broker).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.