 Radu Motisan
Radu MotisanApril 10, 2013: I built a total of 5 ultrasonic receivers, that are to be placed two in the front, one at the back and two on each side.
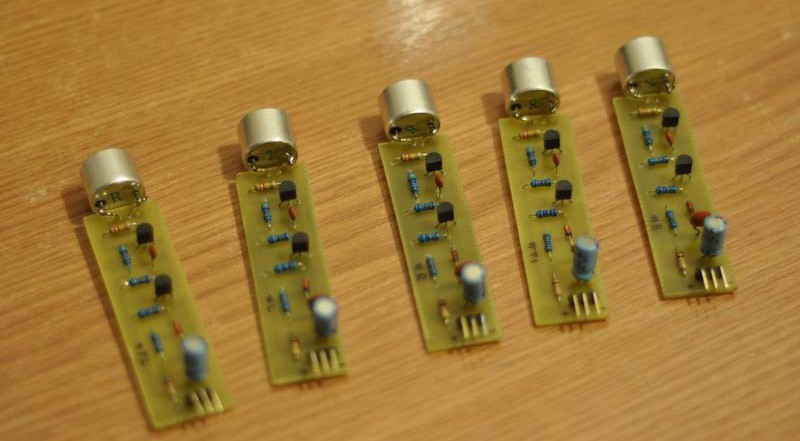 The idea is to have the robot turn around facing the ultrasonic signal, and then to make it follow the source using the two frontal sensors. The differential readings will help us decide whether to adjust the direction for left or right.
The idea is to have the robot turn around facing the ultrasonic signal, and then to make it follow the source using the two frontal sensors. The differential readings will help us decide whether to adjust the direction for left or right.
Using some PVC pipes, I built some nice and robust plastic enclosures, by heating and pressing the plastic to get the desired shapes:
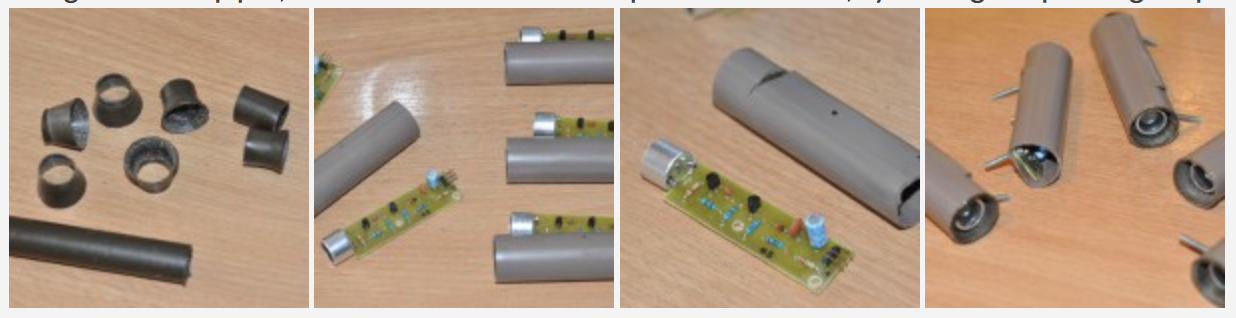 The result looks great:
The result looks great:
 For some uber-coolness factor, I decided to add frontal white lights and back position red lights, controllable from the software (on/off). The frontal side now also houses a nice Sharp 2y0a infrared sensor, that will help avoid hitting any obstacles. So now the robot is capable to hear and see its surroundings. Love how it looks:
For some uber-coolness factor, I decided to add frontal white lights and back position red lights, controllable from the software (on/off). The frontal side now also houses a nice Sharp 2y0a infrared sensor, that will help avoid hitting any obstacles. So now the robot is capable to hear and see its surroundings. Love how it looks:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.