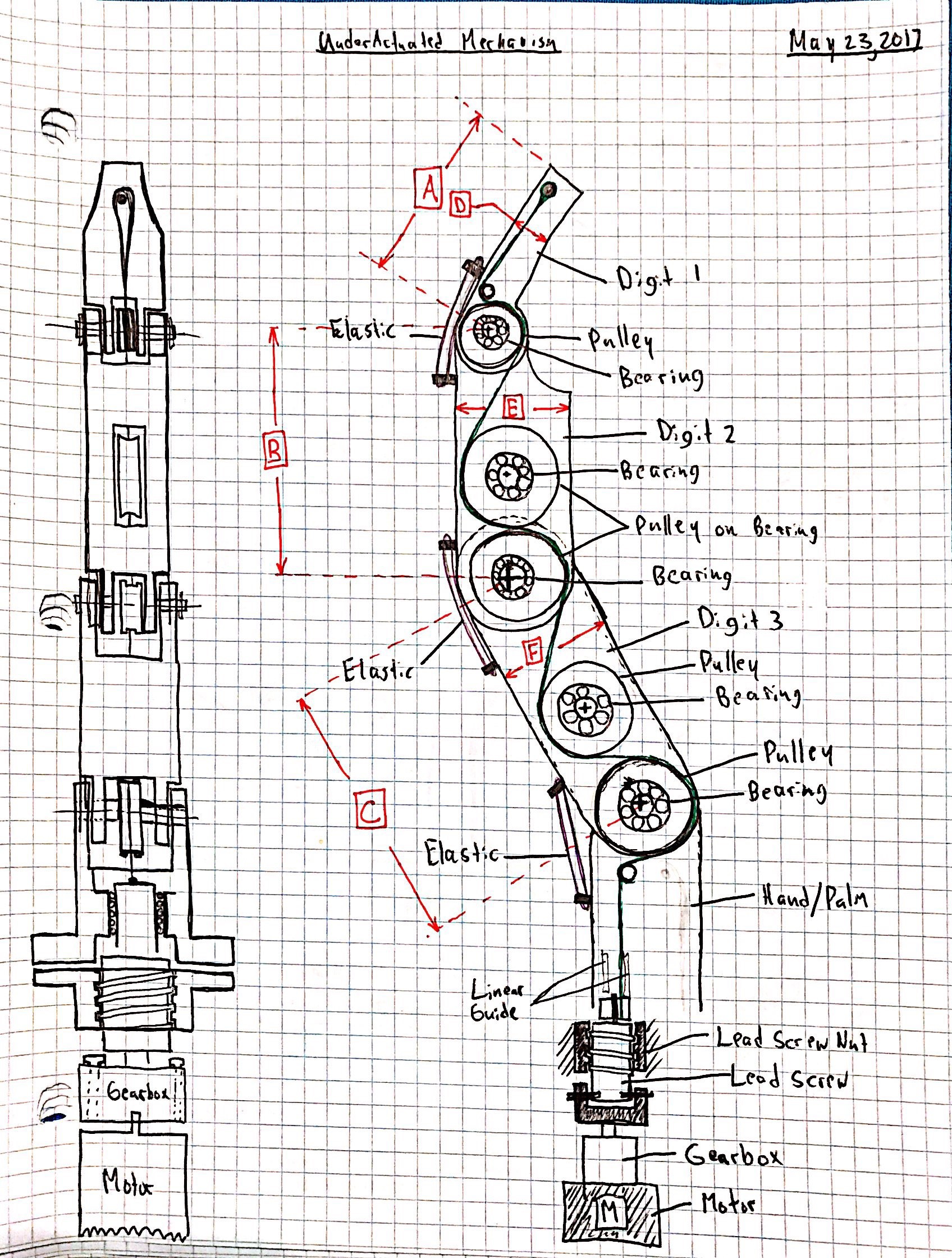
Below is a concept drawing for an under-actuated finger mechanism driven by a cable or string active close and passive open system. The term "under-actuated" in this case refers to the fact that despite there being 3 joints per finger each finger is only driven by one motor. This allows the fingers to conform around any object that it is presented with as opposed to being rigid and fully controlled. the benefit of this is that the finger can put equally distributed force on an object no matter what the size or shape of the object. This is important in the manipulation of delicate object like for example an egg.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.