 saipraveen
saipraveenNext step is to model the entire robot to leave out any obvious mistakes.
Sketchup is my preferred software for 3d modelling as it is simple to use and the availability of many pre-modelled components.
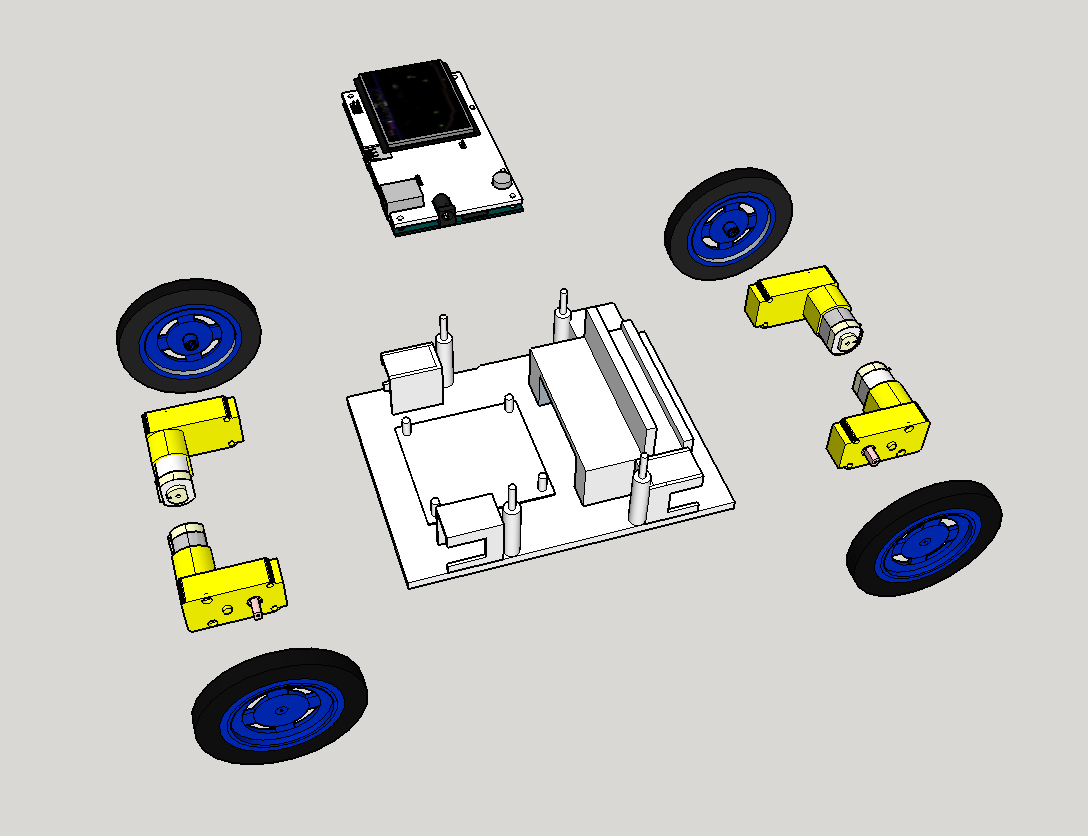
The SketchUp file for the model is part of the files.
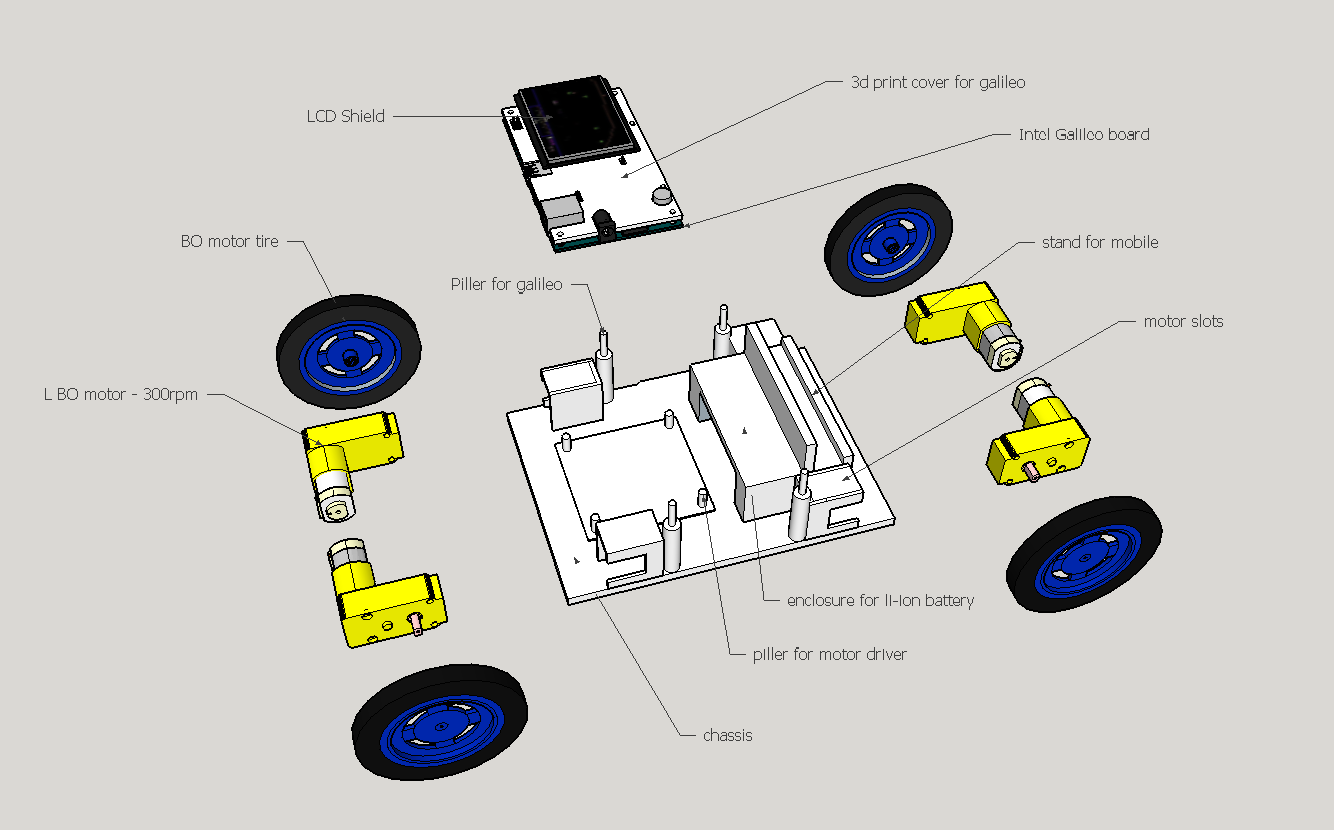
The phone provision is kept in a simple fashion, needs to be tested after printing.
The slots have considered the spacing after measuring using vernier. ( Note : Measuring the magnets using the vernier was a torture as they kept getting stuck in the wrong places - If you have a good idea - do leave in the comments )
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.