 saipraveen
saipraveenThe above prototype taught us a few lessons.
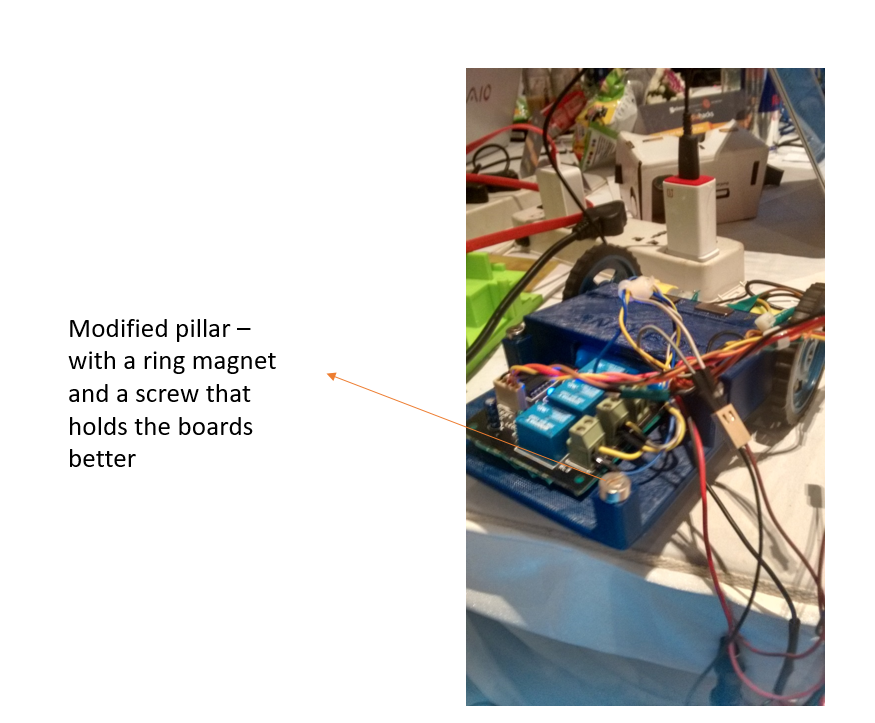
- The pillars need to be stronger - The ones designed for the motor driver broke off and had to be kept within the pillars of galileo.
- The compartments should be removable so that other components can be fitted into the same chassis.
- The robot still doesn't look so beautiful.
The above reasons and some more drove us in making the second revision which is under progress with VR possibility.
The github link for the code is - https://github.com/saipraveend/Snapbot_V2

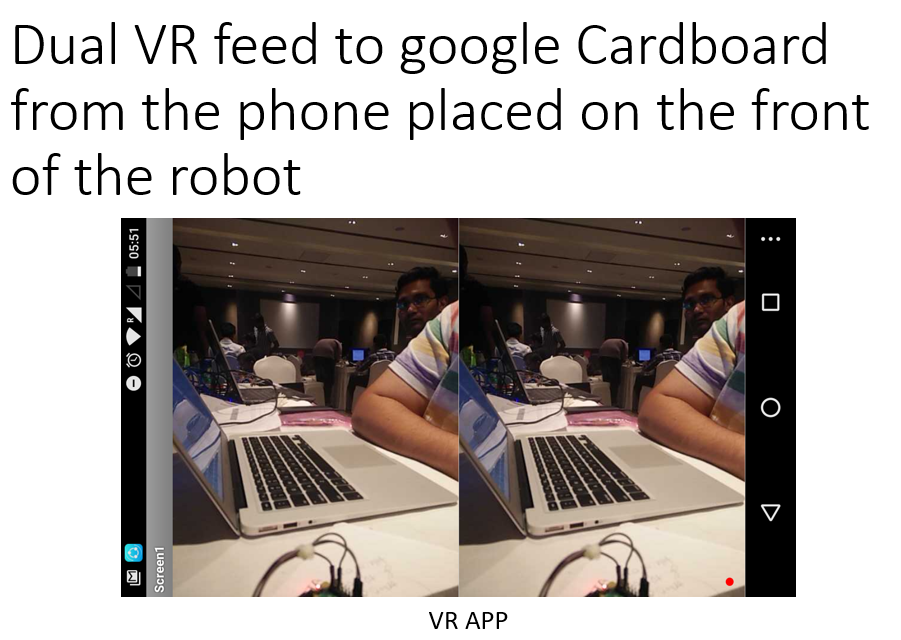
VR app for the V2 Robot.
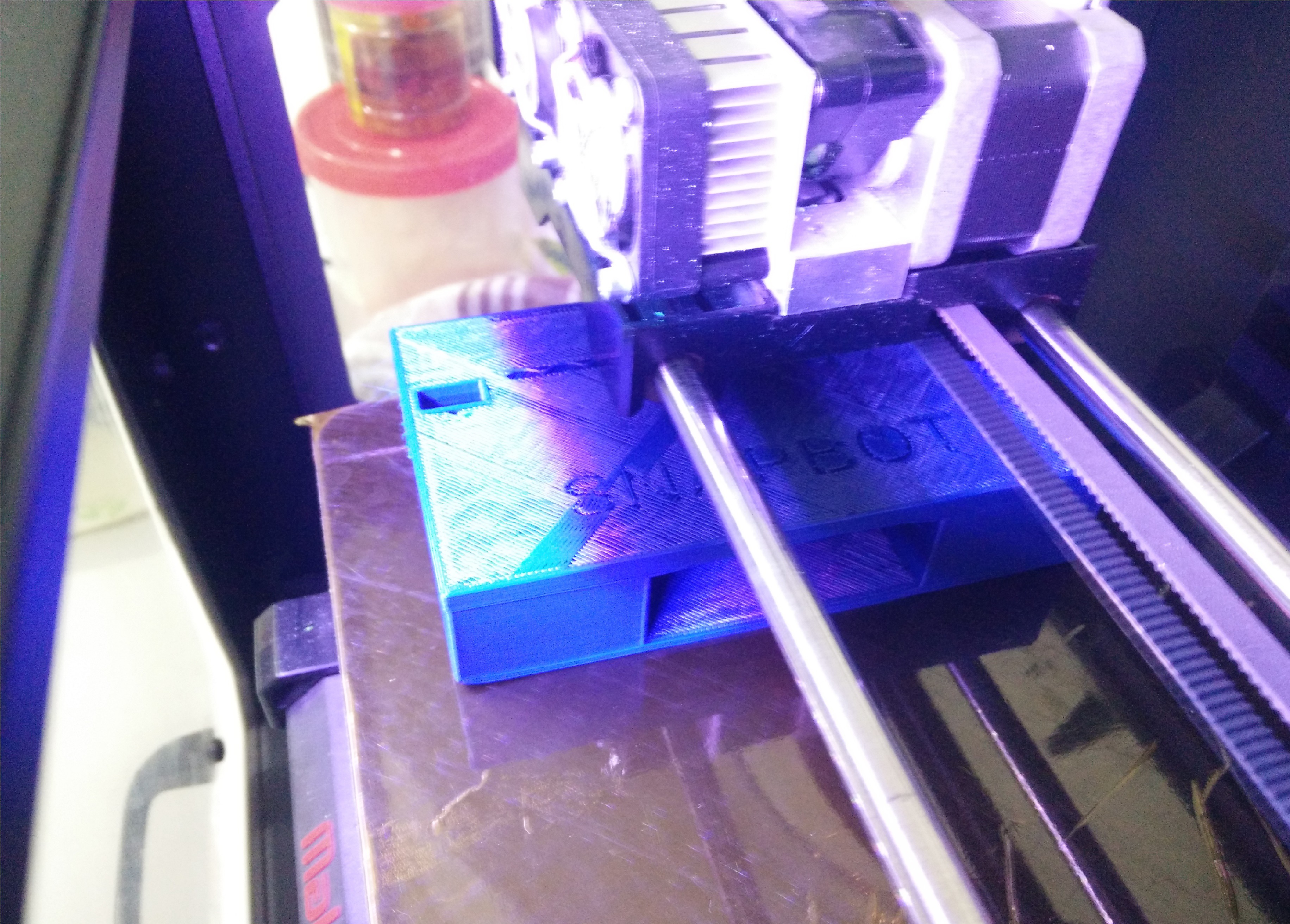
The below image indicates the two different parts of the version 2 robot - The one on the left is the main chassis, the one on the right is the exchangeable part. Both parts attach together with magnets shown.

The two parts snapped to each other. The visible magnets are for the mobile stand. The PCB is the new compact motor driver (L293d).

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.