 Eric Jacob
Eric JacobI've been working to get a demo of the glove working. I have a finger working well with the initial gestural modifiers. Basically, it works like this: bending of the finger up or down from a nominal position each trigger a key. Twisting the wrist to a vertical orientation activates the shift key, further rotation to a palm up position activates the num-pad. In the future additional commands can be given to left hand orientation.
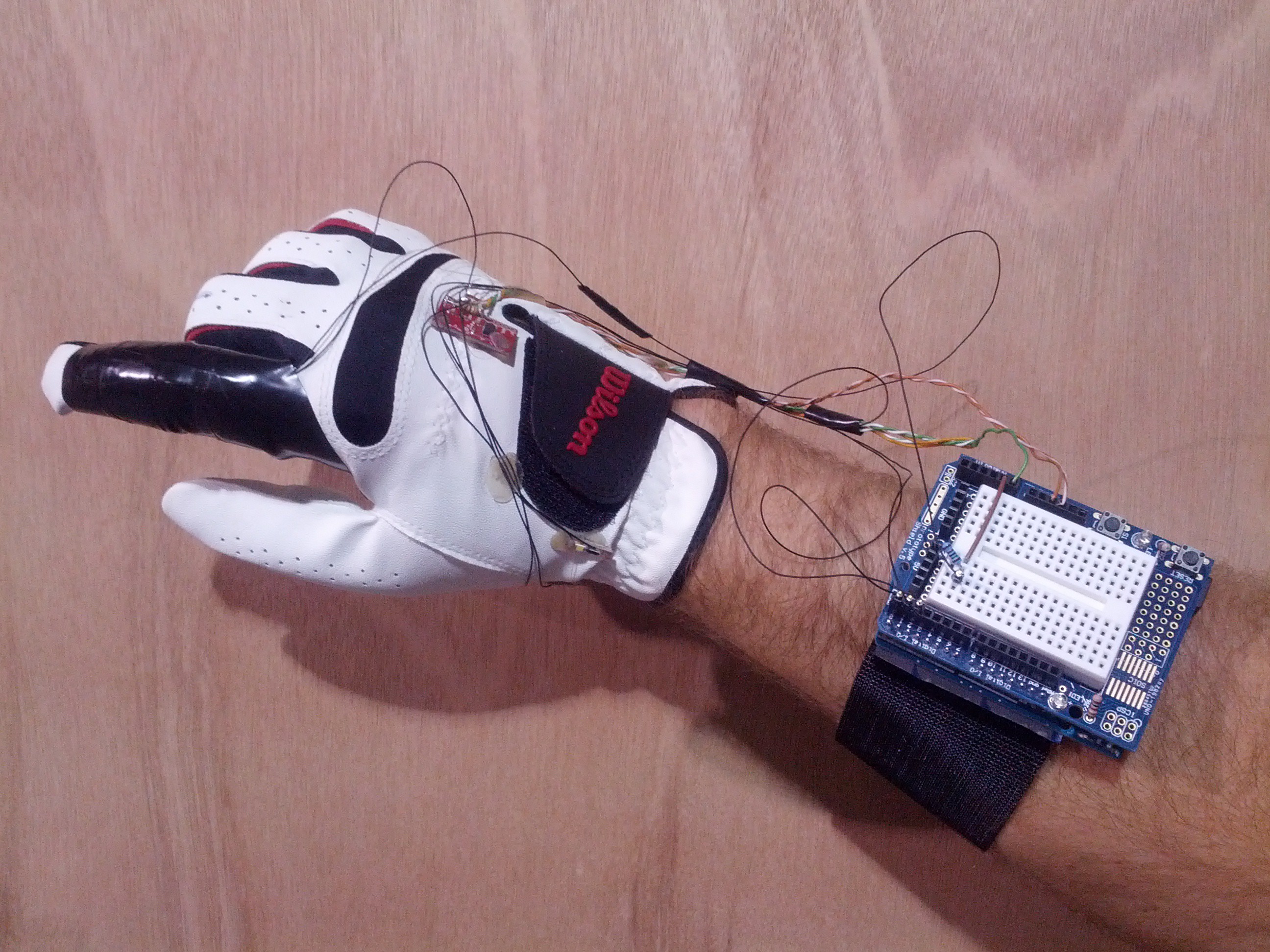
This prototype is running into an arduino leonardo as it can act as a USB device. The arm module would be integrated into the glove in the future. Right now, this one finger is working well, showing the overall methodology.
I am planning to rewire the voltage input from the flex-resistor. Right now it is just running into an analog input, which is not practical for all of the fingers. I will be using comparators with hysteresis to control the logic inputs. More about those in a future post.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.