I suspend the the structure from the ceiling so I can start working on the motor control.

I've never tried pid before, so use bits of 'Brett's' excellent 'Improving the Beginner’s PID' [http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pidintroduction/] as a start.
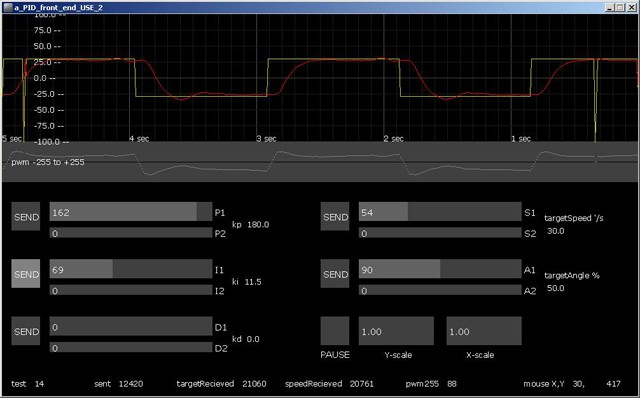
Quickly realise that raw pot readings as an input for pid is just too noisy to work. Spend an interesting week reading up on + trying out, simple filters, mode, median averaging, rolling averaging and more. But I'm just not able enough to get anything to work well enough fast enough, until I come across the phrase "oversampling", at which point everything becomes much easier. During this time I make a simplistic thing in Processing that lets me send values to the arduino, and graph some output. For a few evenings work its turning out to be the most useful tool.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.