 Sepio
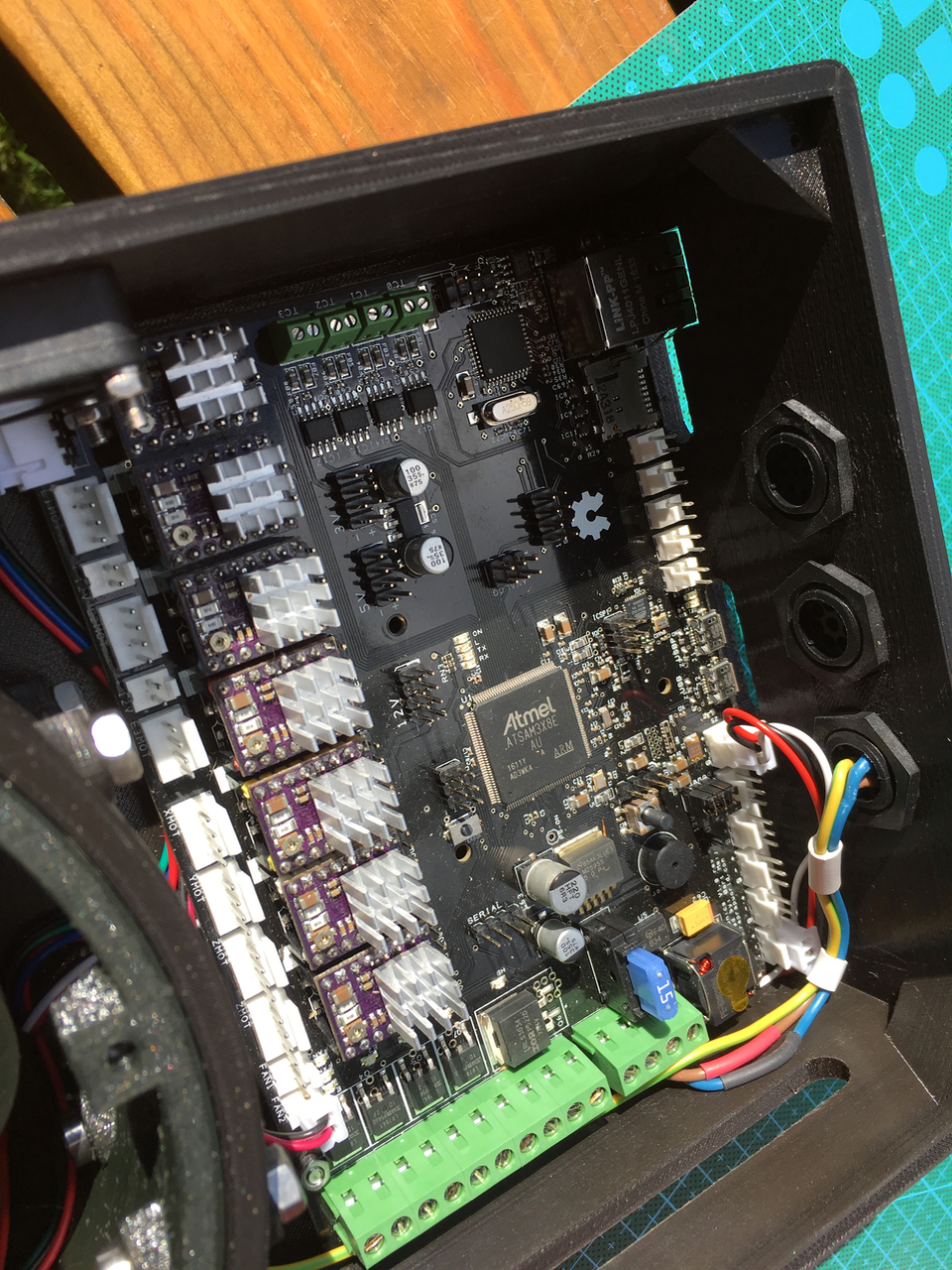
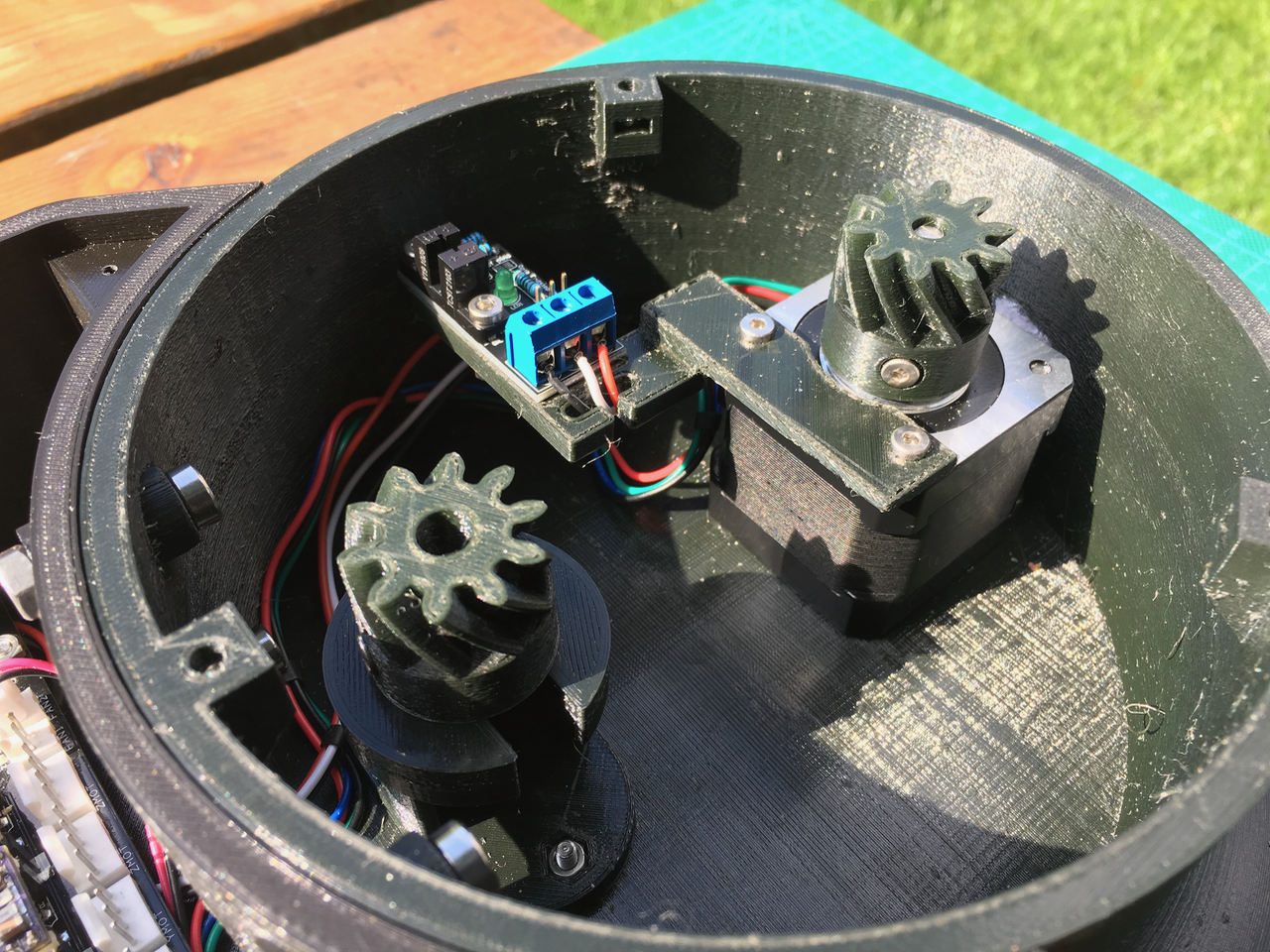
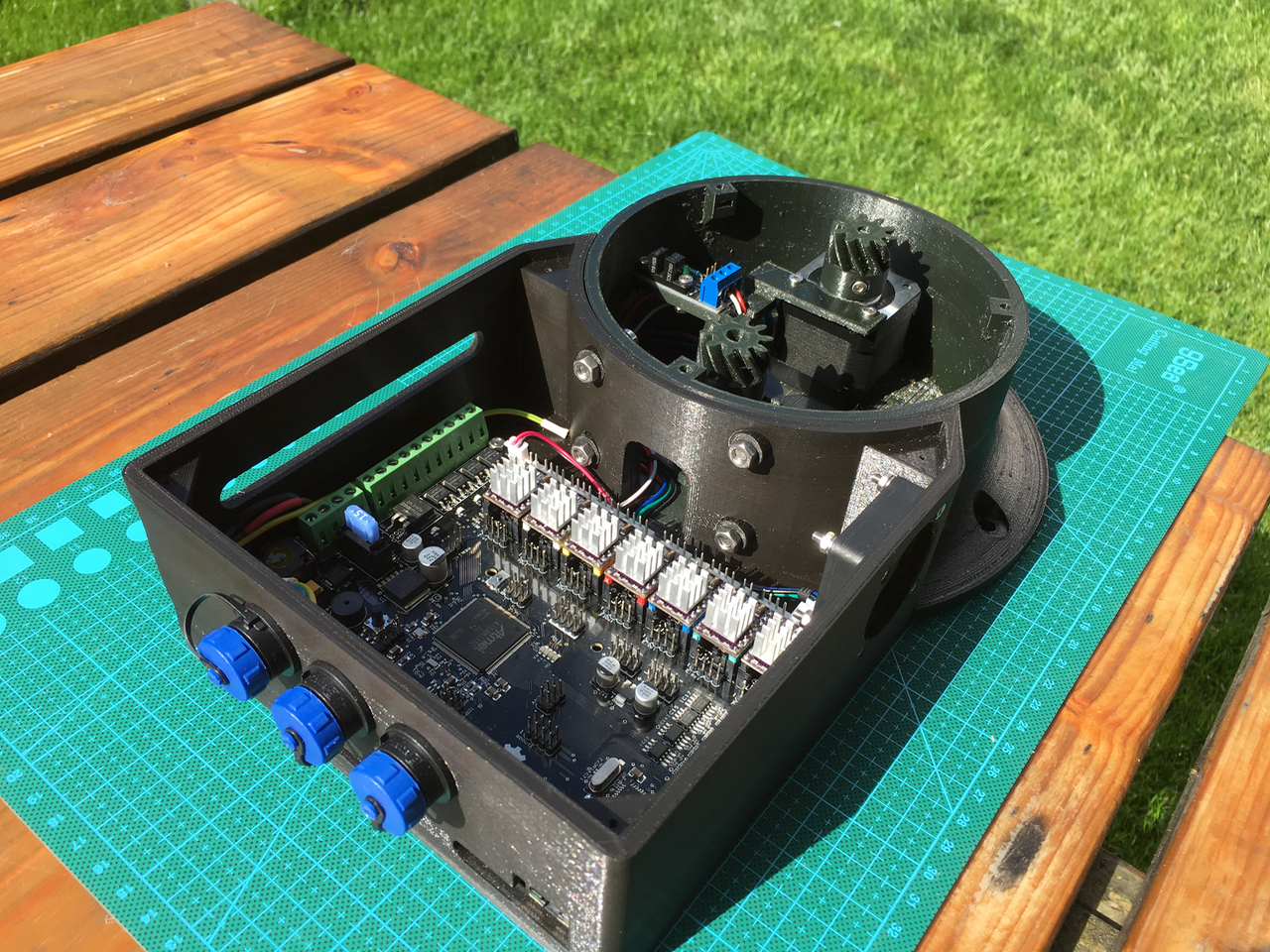
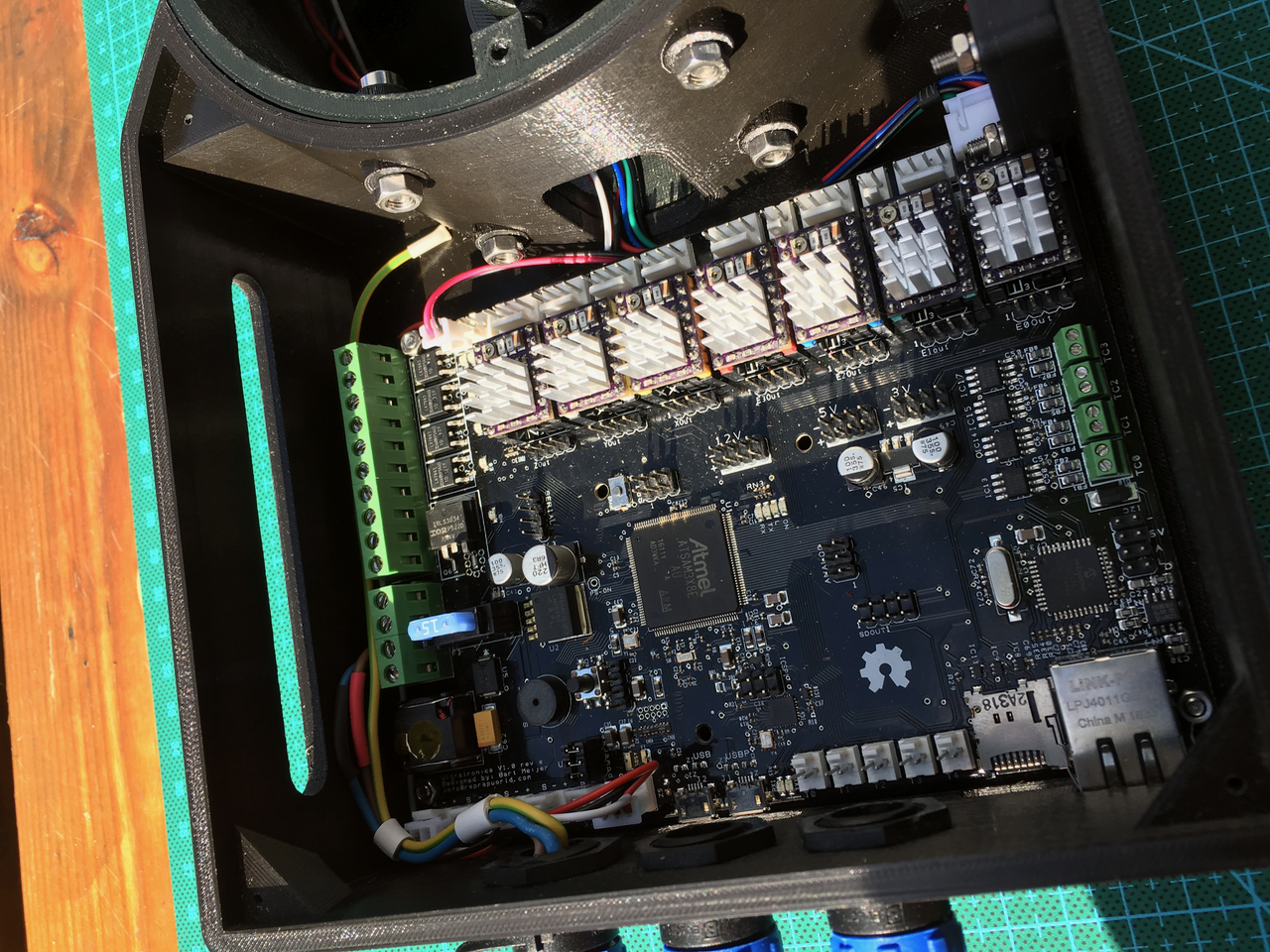
SepioToday I mounted the Ultratronics board in the big case and the stepper motor in the base. I printed the base with PETG. I have to change the printer settings because the filament was a little bit stringy.
A project log for Building and improving the Thor+ robot arm
Building a 6-axis robot arm based on the AngelLM's Thor robot and the add-on's and improvements of dannyvandenheuvel.
Today I mounted the Ultratronics board in the big case and the stepper motor in the base. I printed the base with PETG. I have to change the printer settings because the filament was a little bit stringy.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.