 Dan Julio
Dan JulioThanks to HaD for featuring this. I guess I should add the bit about what we learned, what went right and what went wrong.
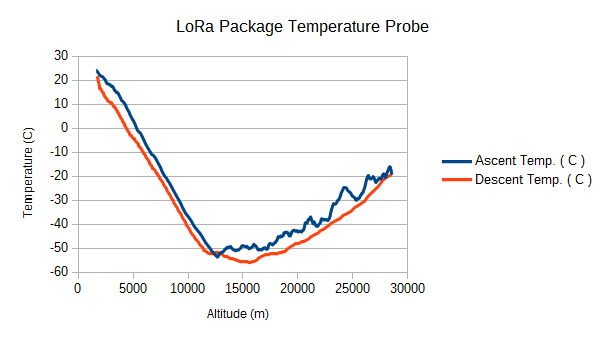
First a graph of the outside temperature measured by the DS18B20 sensor. Tim theorizes the descent temperatures may be more accurate because of increased air-flow over the sensor as the payload fell.
We are still hoping to post 360° video. We have it processed but the Samsung processing program stripped the meta-data that youtube wants to enable viewing.
Things that went wrong
- We misconfigured the Tracksoar to enable repeating of packets which caused aprs.fi to stop logging our data after the balloon reached about 38,000 feet so we lost its track. The android app APRSdroid has some trouble decoding packets although worked at the end as the recovery team was trying to find the payload.
- The balloon gained altitude much more slowly that we originally calculated it should. It was quite as high as we wanted it during totality although we did get some interesting shots. We are still trying to understand what went wrong and theorize that the ballasts we were using to fill the balloon to the desired lift may have been lighter than we thought (they were filled with water and perhaps there wasn't as much water in them as we thought).
- One of the raspberry pi's recording video (downward) had a corrupt filesystem upon recovery. All three pi's crashed when the payload landed and it may be that the crash corrupted the micro-SD filesystem. It's not clear why all three pi's crashed. One of them (the LoRa) payload was connected to a 3 AA battery pack and it's possible the power was interrupted. The other two were connected through a USB hub to a USB power bank. It may be that the connection to the Micro-SD card was interrupted.
Things that went right
- Planning paid off. Tim and Brandon were pretty rigorous about creating setup and launch plans and making lists of everything that had to be packed for a successful launch at a remote campsite. The launch went very smoothly and on time. The launch site, chosen based on flight predictions, was good and the balloon followed the estimated flight path fairly well (it came down slightly further east than originally calculated).
- Having a backup telemetry system provided the basic landing location (the last packet was received in Casper about 700 feet in the air). Having multiple LoRa receiving stations let us get telemetry from that payload for the entire flight.
- APRS was successful in the end to locate the payload. The recovery team was looking in the general area and receiving strong APRS transmissions but had trouble decoding these with the app. Finally one was decoded and directed them directly to the payload. They also had downloaded a map of property owners and were attempting to contact the owner of the ranch when a friendly state police officer stopped by to see what they were doing. He know the ranch owners and took them directly to their house where they got permission to enter the property (with an admonishment about being careful not to start any fires on the tinder dry land).
- Multiple cameras were able to capture some different, interesting images. The Samsung 360 camera had troubles overheating so it was stored in a refrigerated environment until launch. Although it only recorded 2 hours of video (still had battery power and SD-card space left), it was able to record totality.
- Multiple methods of communicating between teams including a messaging system (we simply had a group on facebook) and 2M HAM radios was helpful.
Things we would change for a future launch
- Improve communication abilities between teams and recovery coordination. We ended up having to relay some instructions between various members during recovery which complicated things a bit. We weren't able to use the directional antenna for the 40 MHz locating beacon although one recovery team member thought they heard it on their radio.
- Double check balloon lift prior to launch.
- Correctly configure the Tracksoar.
- Test and harden the flight computers. Perhaps replace one with an off-the-shelf camera retrofitted with CHDK to get use of its better optics and ability (the Pi cameras aren't as good as commercial cameras).
- Hardware all power connections (e.g. solder to batteries and computers).
- Perhaps a slightly different mounting of the parachute to reduce the impact of the balloon remnants.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.