So, having been away at XDC (https://www.x.org/wiki/Events/XDC2017/) last week, and having finalised the CAD designs for my tracks just before I left, I was itching to get back and build a new pair of track modules.
I managed to get on to the Makespace laser and 3D printer last night and get all the parts I needed to build the track modules:
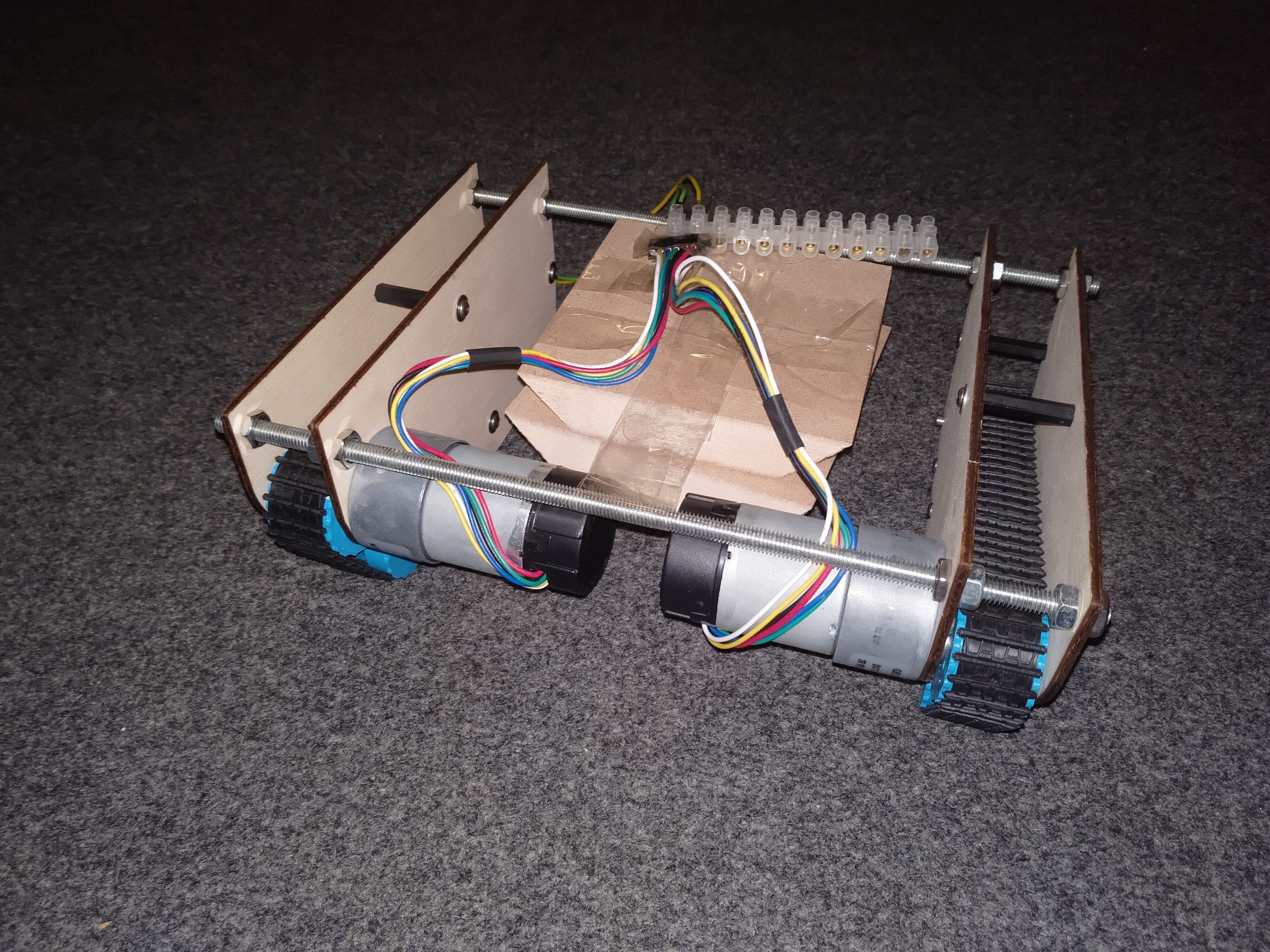
So now it's starting to look a bit more like a thing that can drive. And it can drive, but it turns out I have quite a problem with the centre of gravity being too high and/or too far forward (better with sound for comedic effect):
The MDF blocks sellotaped in the middle are just to add some weight - because otherwise the motors make it really really front heavy, and it falls over all the time. I haven't got any controller electronics on it yet, both motors are just plugged directly in to a DC supply.
There's plenty of other kit to add in to the robot, which should quite significantly change the weight distribution and dynamics, so I'm not too concerned about the instability just yet - but I will bear in mind that I need to design the rest of it to get as much weight low down as possible! And
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.