 Sinclair Gurny
Sinclair GurnyProgress:
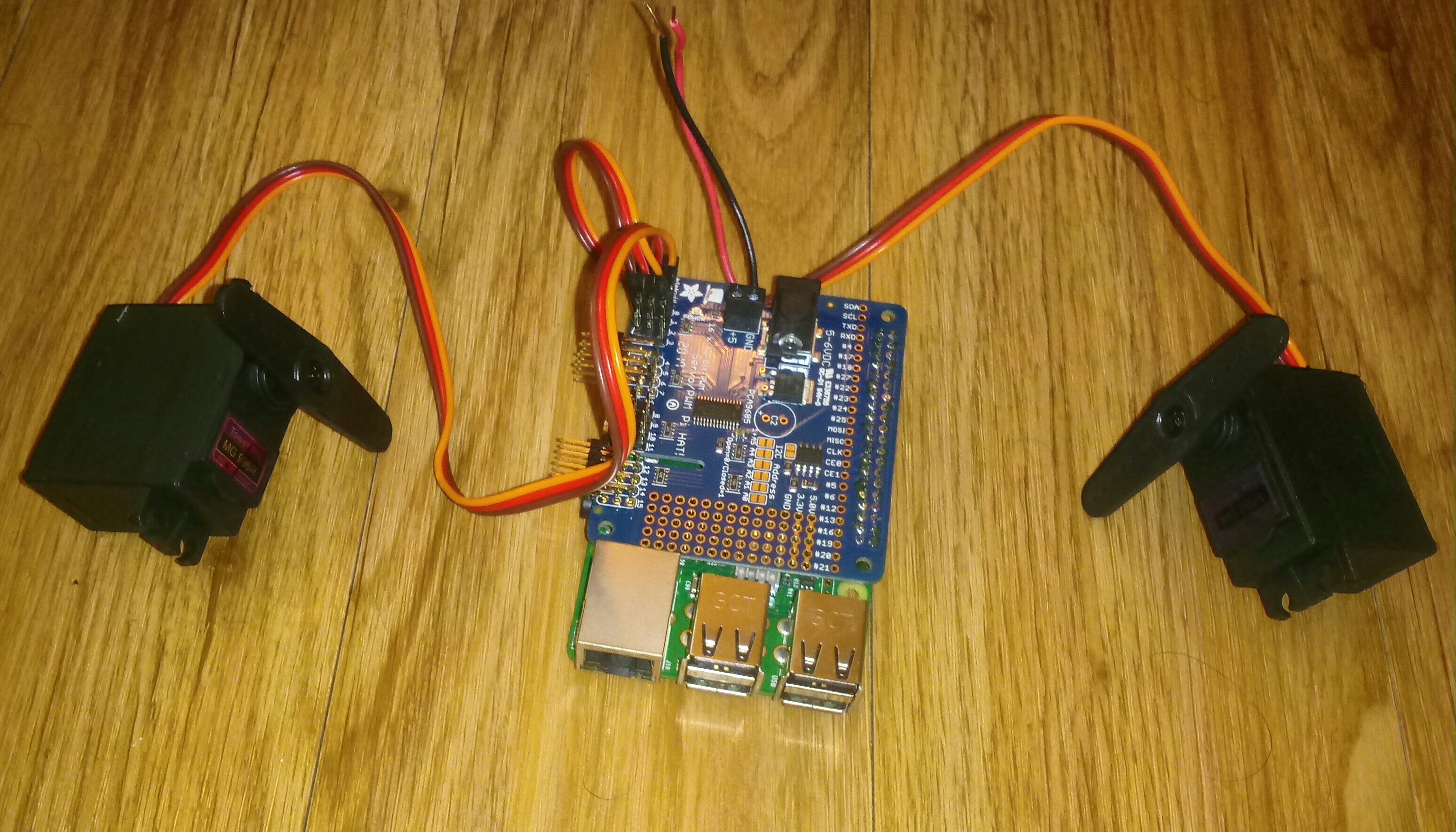
The main drive system use MG-996R continuous rotation servos controlled by a Raspberry Pi 3B with a servo hat. I rewrote the servo hat python code (Adafruit Servo Pi Hat) into C to allow for better integration with my code in the future (See file).
Upcoming:
3D printing of wheels and chassis to allow for 'RC' via ssh. The wheels will be at most 8" diameter and printed out of PLA, because my printer still requires tuning before switching to other filaments. In the future I plan on using Nylon 910 or similar filament for wheels. And chassis will likely have some metal in its frame.
Next Steps:
Design decisions on whether the drone will be controlled via RF or via WIFI. And how to stream video to control system (drone POV vs webcam). As well as integrating my preliminary jumping mechanism into the chassis design.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.