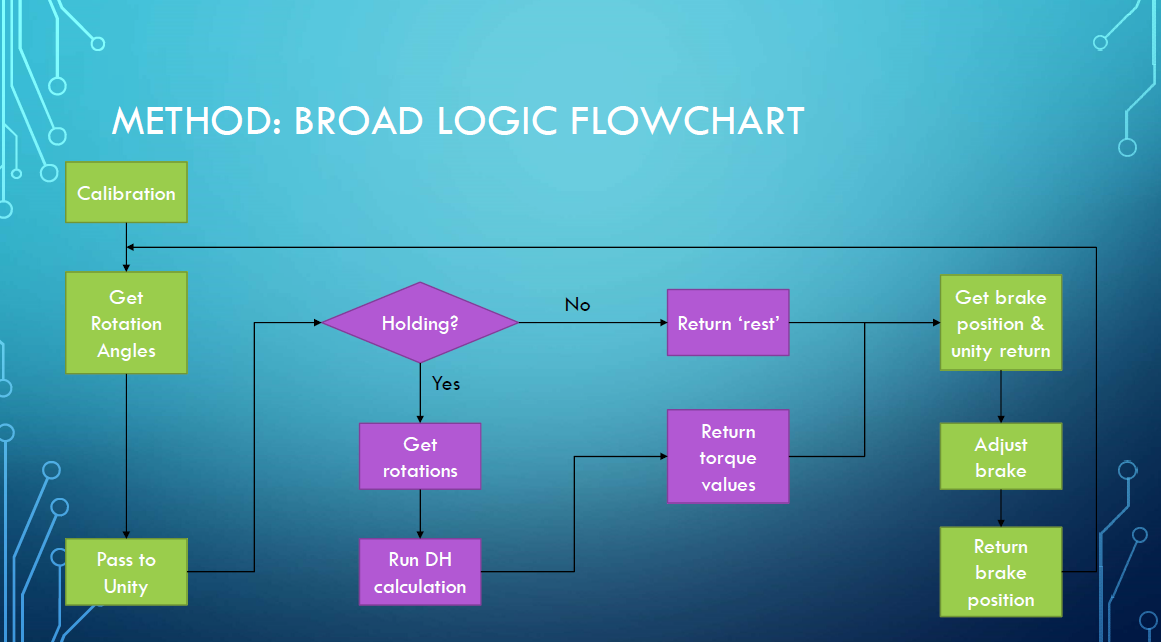
Calibration: Motors wind back, hit the limit switch, and advance forward to determined location.
Get Rotation Angles: Arduino board receives angles of each joint from mounted potentiometers.
Pass to Unity: Via USB.
Holding?: Unity determines if the user is holding a weight or not.
NO) Return 'rest': send value to motors to position not in contact with brake.
YES) Get rotations: read rotations.
Run DH calculation: Runs Denavit-Hartenburg calculations to determine torque values.
Return torque values: Sends these values to the motor controllers.
Get brake position and unity return: Compares requested position to current position.
Adjust brake: Adjusts to desired position if previous step shows a difference.
Return brake position: Sends position back to confirm final placement.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.