 allai5
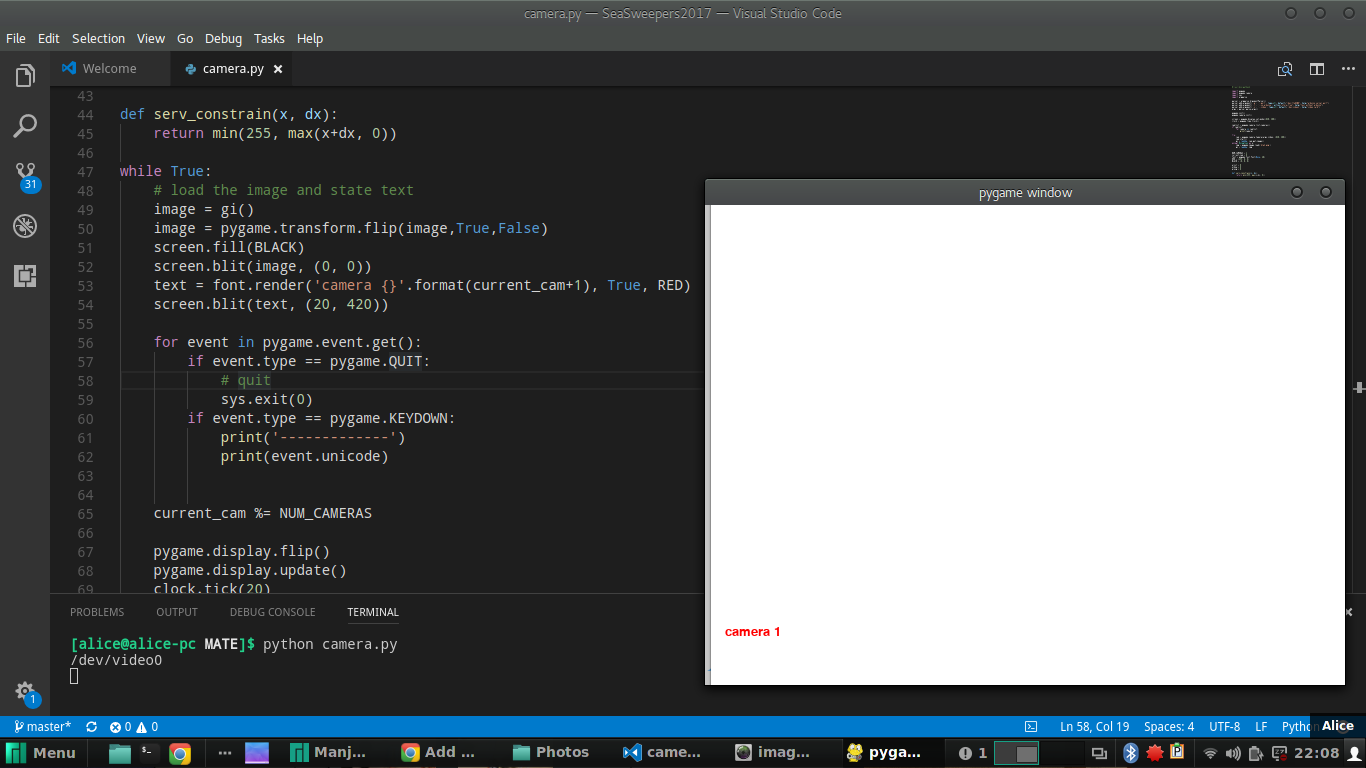
allai5Since we are using a low-cost backup car camera, the camera feed is inverted, but for intuitive control of the ROV this needs to be reverted back to a normal, “forwards” view. To do this, after threading the camera through the tether management cross, we plug the RCA plug of the camera into the video plug of a USB capture card. Using a Python script and the pygame library, we are now able to concurrently revert the camera feed and display it on the operator’s laptop.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.