 JanThar
JanTharProject plan so far (apart from finding out if anybody else find such a system as useful as we :-)
Belt:
- 8 Vibration motors on the back for vibration feedback, using encapsulated ones which will be further encapsulated with epoxy, silicon or whatever encapsulation method we found best
- 2 buttons on the front. Since we want to use the system direct under water surface, normal buttons should still work, otherwise we revert to the hall sensor/magnet combo used for diving
Snorkel (first we thought about a fin at the belt, but the snorkle seems to be the best place: Above water for GPS and Communication, and with most of the components there, the encapsualtion should be easily doable)
- GPS for localisation/clock Neo 7M
- UV sensor (since GPS antenna is on top, we need to find out a nice way to guide the UV-light to the sensor). At the moment eiter VEML6070 or SI1145 - UV directly or together with normal lights. Since the water encapsulation might filter UV light we have to test which sensor is more feasible
- Bluetooth: HC05, easy to use, but master, slave system. A mesh network solution (XBee or something else) might be better for diver to diver communication
- Acceleration/Gyro/Compass: MPU 92/65
- SHT31 for Humidity and Temperature - checking if something goes wrong, that the encapsualtion is working
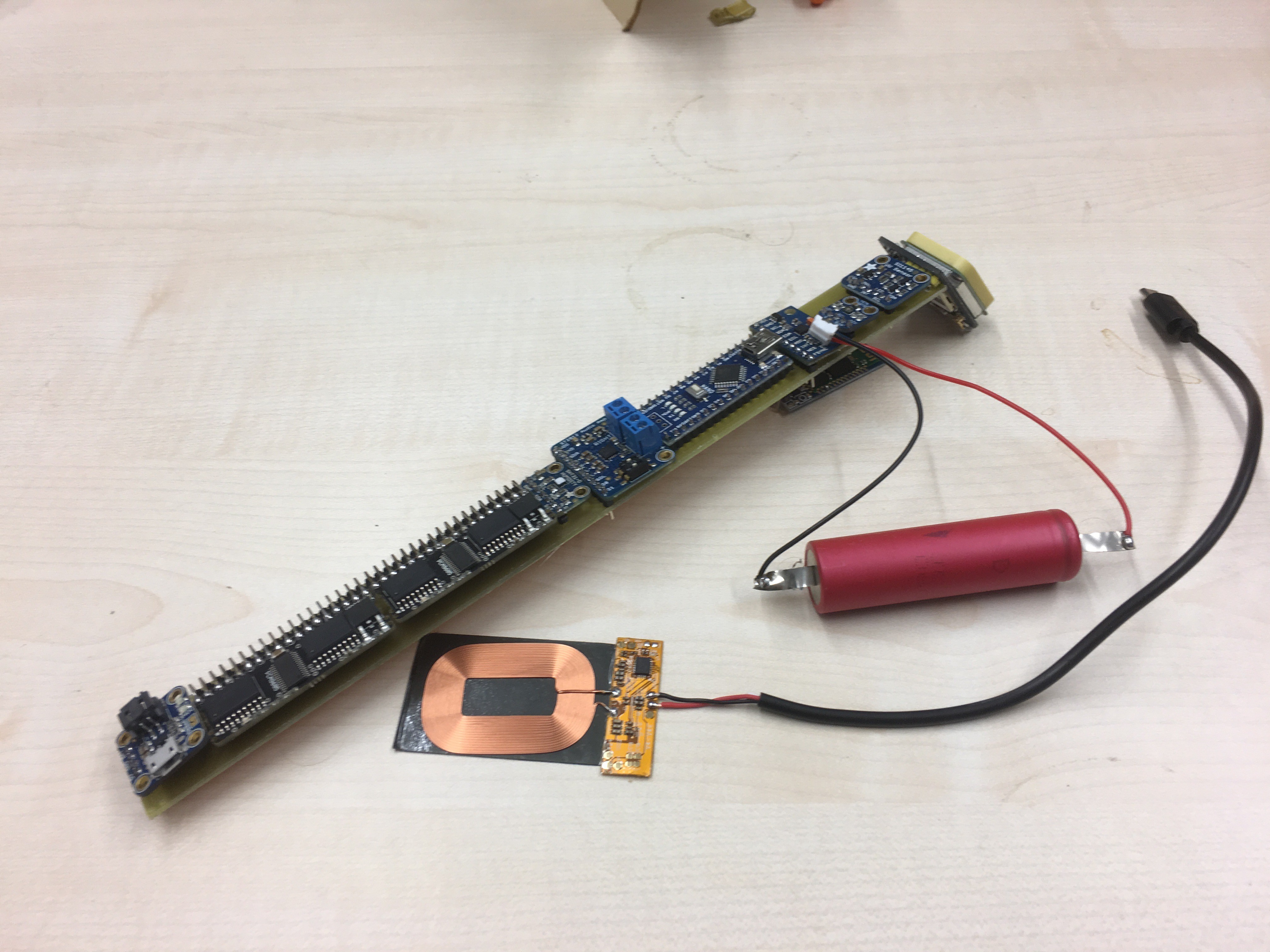
- Vibration motor driver board which we have from the personal photonics project (https://github.com/JanThar/HapticHardware), with removed voltage regulator
- Adafruit Qi Charger circuit (https://www.adafruit.com/product/1901) and Lipo charger for charging a single LiPo cell (in this case the standard LiPo cell salvaged from an old computer battery pack) without cables (encapsulation)
- Arduino Nano (with removed voltage regulator)
Since all boards can run between 3.3 and 5V, we don't use voltage regualtors but let the voltage slowly drop instead.
All components fit nicely inside the extension of the snorkel, allowing a clean setup.
 Reinier van der Lee
Reinier van der Lee
 Audrey Robinel
Audrey Robinel
 Alexander Dvorkovyy
Alexander Dvorkovyy
 YJ
YJ