 agp.cooper
agp.cooperInspirational
I found this doing an Internet search of "Animatronics":
Source: "See RoboBones and RoboHead" (http://www.animatronics.org)
Back to Work
Elected not to shunt the external Nano power supply to the motor power supply.
The external power supply input has a schottky to protected against reverse power supply connections. This has the unintended consequence of preventing back EMF from returning to the battery (usually desirable). Instead any back EMF has to be absorbed by the driver boards or the Nano board.
I had lots of problems with back EMF trying to use a common external battery in the past so this time around I will have two separate power supplies.
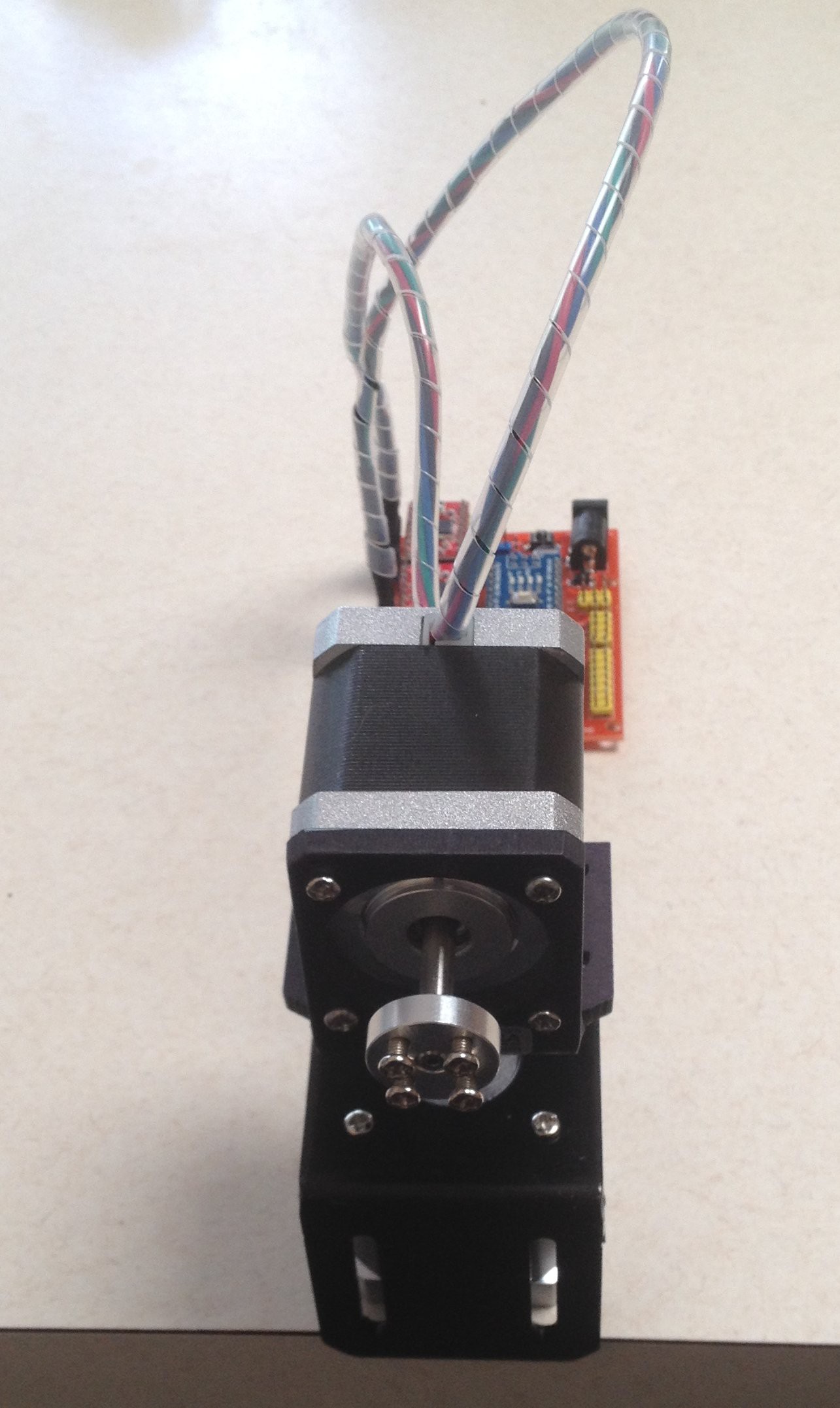
Added some cable sleeves:
Working on the Code
A bit more complicated then I expected. Do I want to move at an arbitary direction? I suppose I do, so I will gave to code a Bessenham's line drawing algorithm.
Set up an Interrupt Service Routine (ISR) for the step pulse generator. I have limited the maximum pulse rate to 500 PPS, which is safe from a standing start for full step operation for nearly all common stepper motors. Should be able to bump this up for micro-stepping.
Magic
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.