 Giovanni Leal
Giovanni LealWell... we will give you the data and youlll make your conclusions.
First the metodology:
- The project was developed with a framework of agile software development (DAD).
- Through three incremental iterations, where solutions were provided to each one by adding new functionalities in the next one.
- There are two configurations. (natural and mirror)
- The three iterations consisted of one arm, two arms and two arms remotely.
- The measurements and indicators were defined for two kinds of observations. User’s perception of comfort and performance of the completion of the tasks.
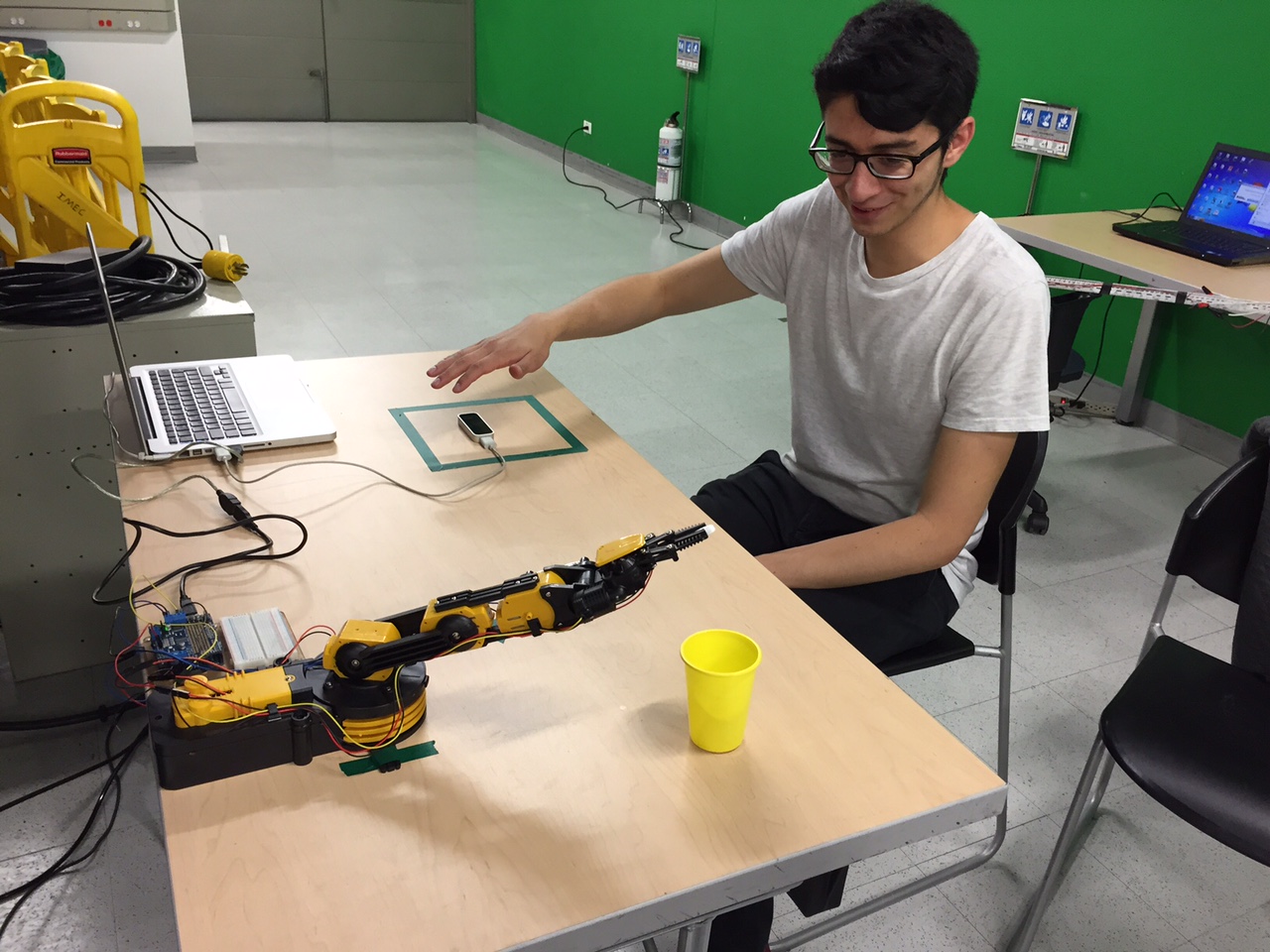
So we started on the first iteration:
- One robotic arm
- Interaction with one hand
- Mirror and natural configuration
- One Leap Motion sensor
- Two tasks
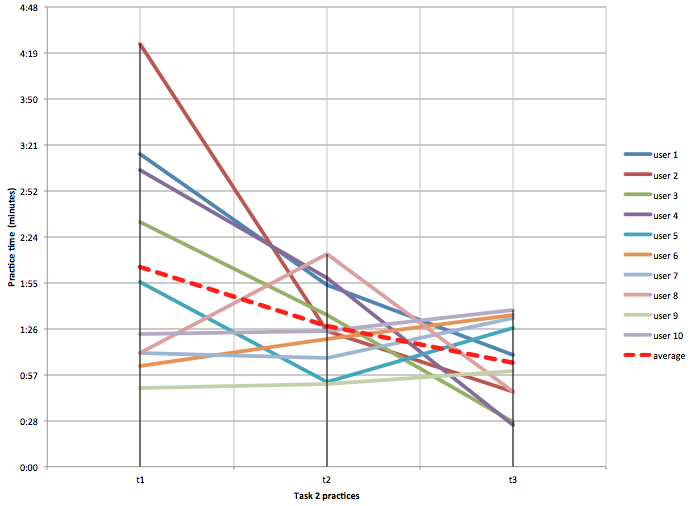
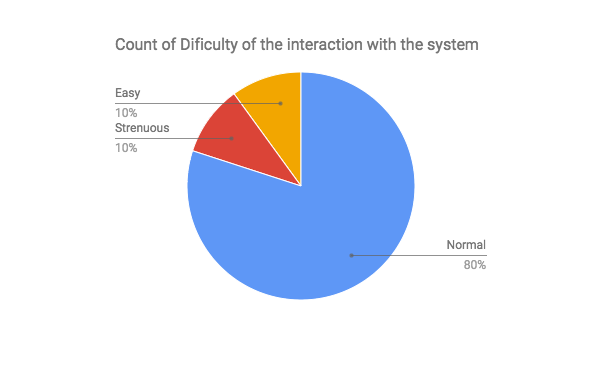
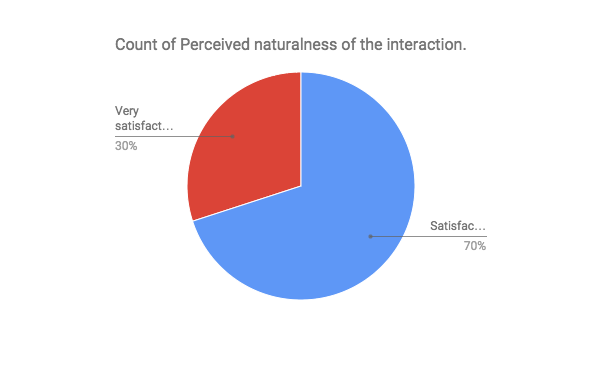
And the feedback was pretty good!
Overall everyone was very please, keep in mind that the task where designed for no more than 10 minutes because you will get tired from keeping your arms straigth on the air. For example BMW cars now equip this feature on its cars but only for short commands.
So as always feel free to ask us anything!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.