 Ulrich
UlrichWhat I did and improved in the last two weeks:
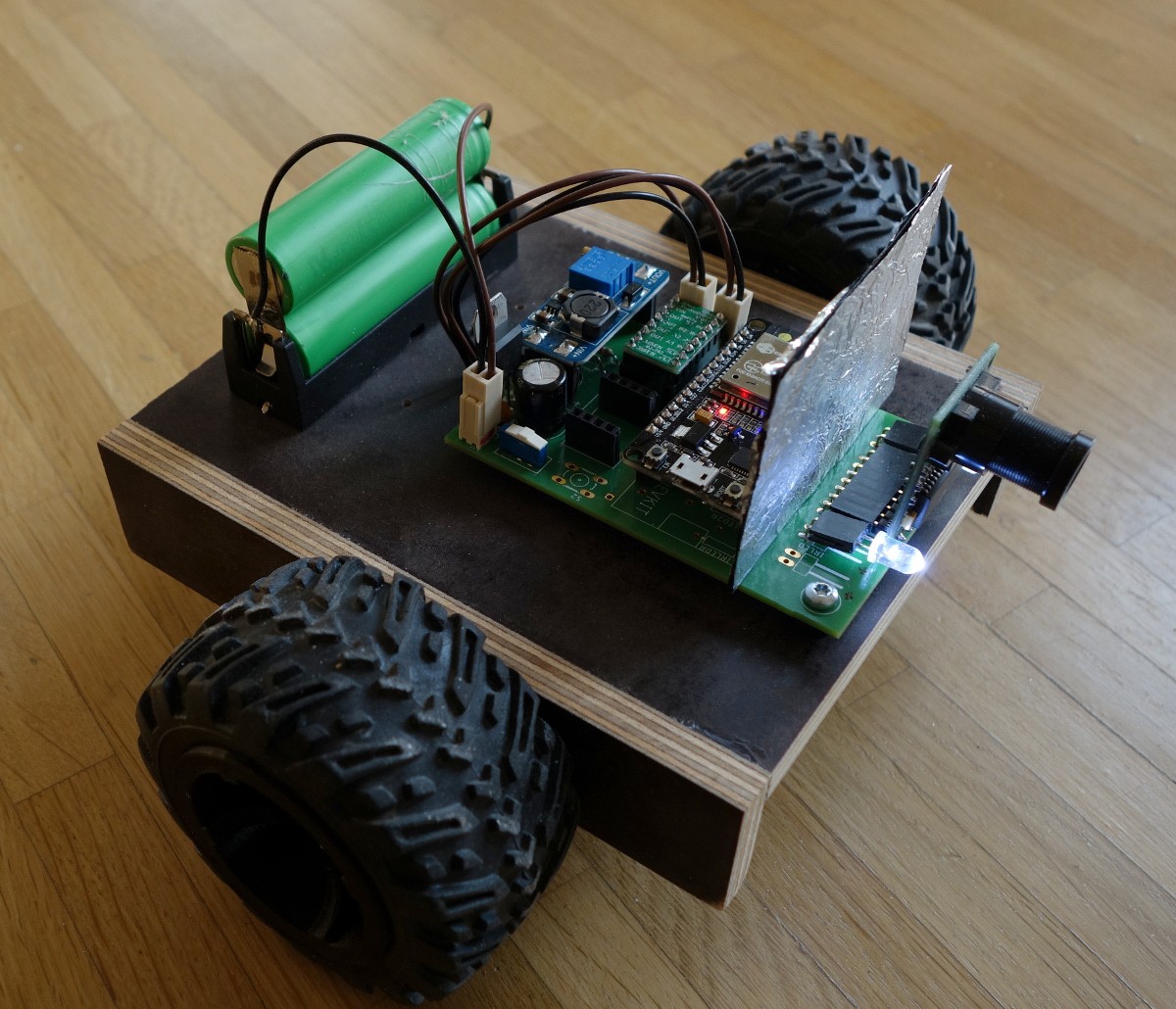
- Designed, ordered and used a professionally printed board
- Changed the motors for bigger ones (a bit more slowly rotating)
- Thus changed the prototype chassis to a much wider one - it is now too wide for practical use I think
- Debugged and (partly) found an odd Wifi transmission problem: The camera interferes severly with Wifi transfer
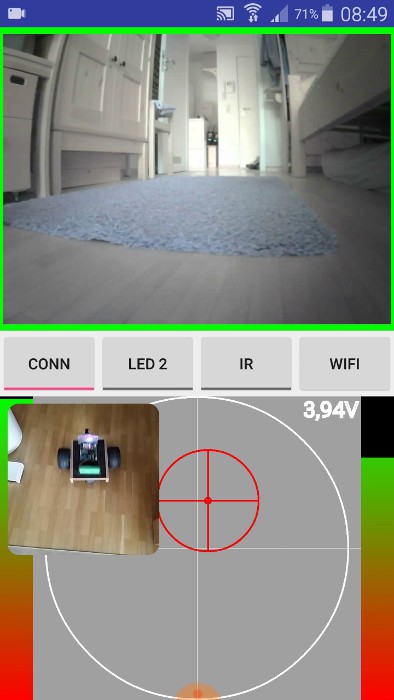
- Written an Android app for image display and remote control
Now there are some problems still or newly open:
- The camera interference is not solved (https://github.com/ArduCAM/Arduino/issues/301) - I improved the situation a bit by using an aluminum shield between camera and ESP32
- The motors are very different (left and right) and generally without any control over them (-> encoder) the movement cannot be sufficiently controlled
- Delay from the camera capture (200ms at least) and the poor Wifi transmission make a very sluggish image transfer and thus the control once the vehicle is out of sight is nearly impossible
But still: Something moves remote controlled!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.