 Ulrich
UlrichA replacement esp32 board arrived and the car now actually does something (desired).
I now have:
- Image display and rough control: a webserver serves the current image in a stream and another server (different) port reacts on control requests - currently only bursts of forward, reverse, left and right.
- Motor control (PWM) with soft start and stop
- All of which with a pre-emptive multi-tasking so that image transfer does not block everything else
Next steps: Android app for finer control and home-made PCB (properly designed).
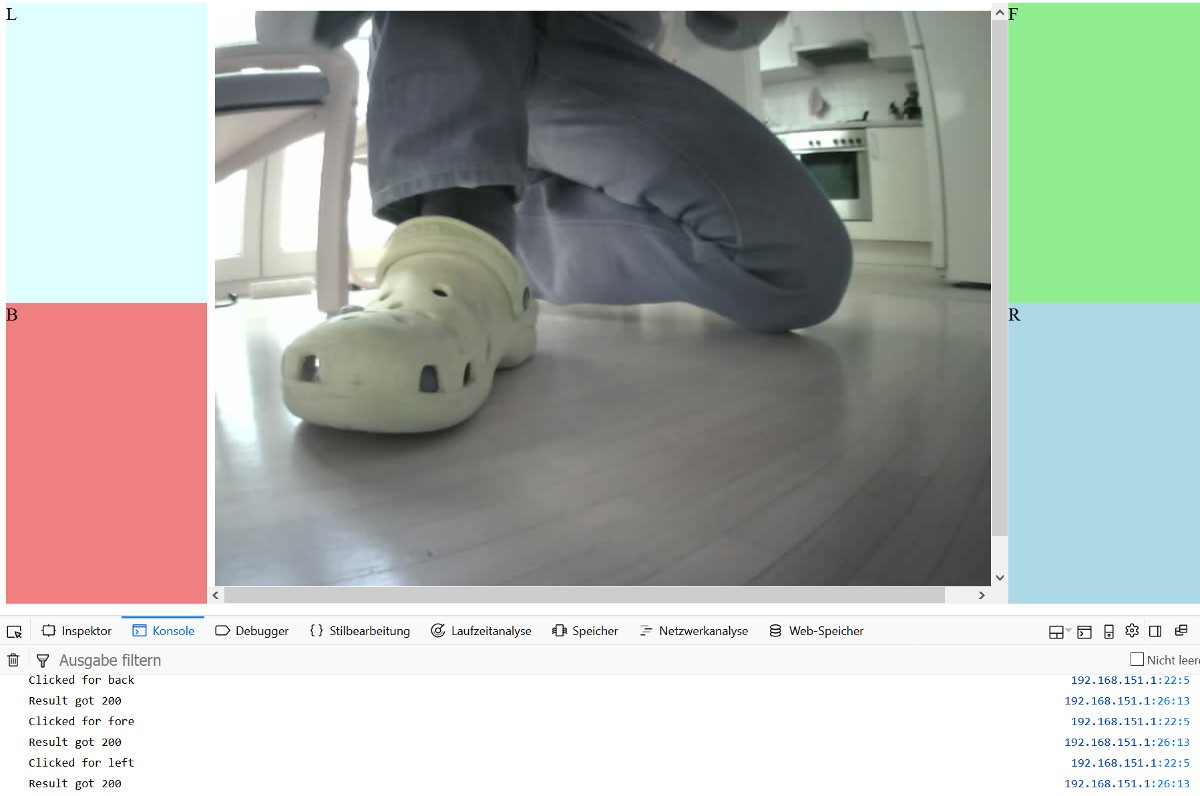 Note the color tinge from the ir-sensitive camera - lens without ir filter.
Note the color tinge from the ir-sensitive camera - lens without ir filter.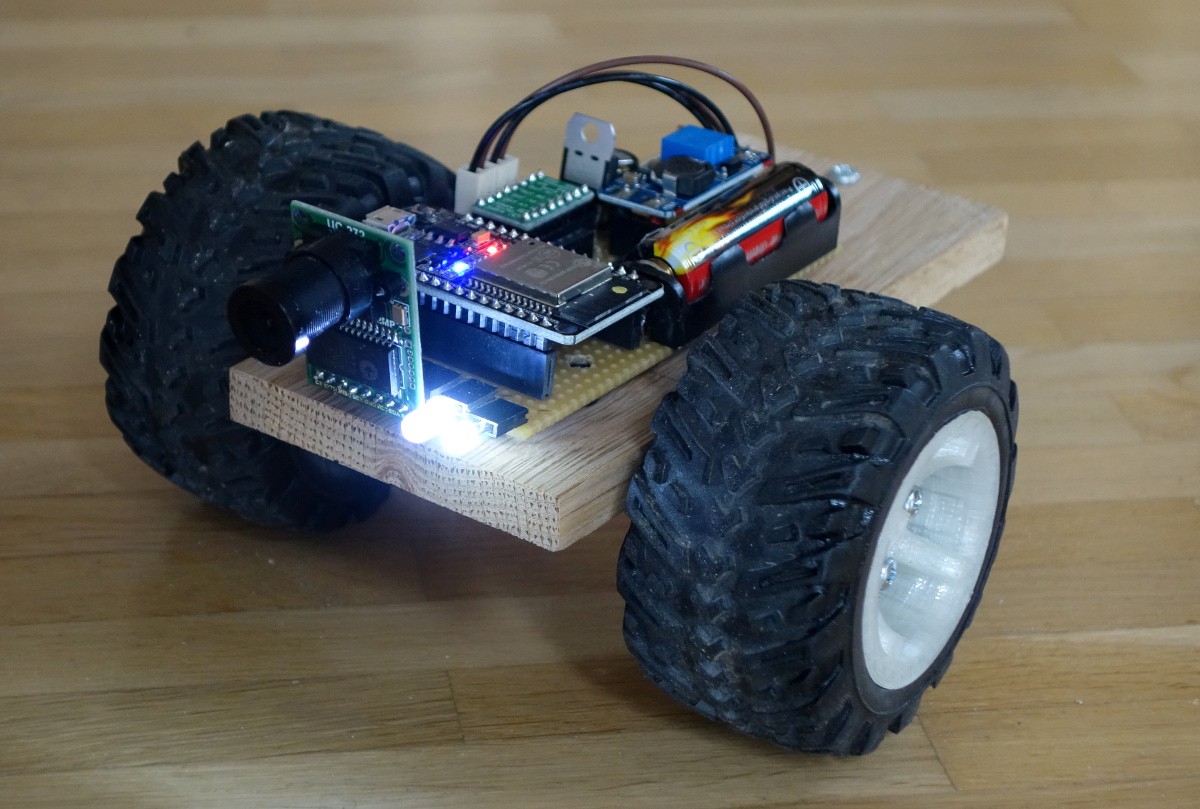
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.