 zakqwy
zakqwyOne of the many NeuroBytes boards we are currently developing is the Tonic Neuron. This board is sometimes referred to as the Izhikevich Neuron due to the origin of its algorithmic inspiration (and ensuing porting effort, first detailed here and here and continuing elsewhere, which is a discussion for another log post...). The Tonic Neuron is useful because it fires spontaneously, allowing the user to inject periodic signals into a larger NeuroBytes network. In addition to modelling actual tonic neurons in the body, these boards provide a compact (compared to ring oscillators) 'pacemaker' for robotics experiments such as the NeuroBuggy and the Invertebrate Locomotion Model.
In an effort to reduce the BOM price, assembly steps, physical size, and general clunkiness of a potentiometer-based board, I spun up an experimental PCB to examine the possibility of using a linear touch slider as the user input for varying the Tonic Neuron's pulse rate:
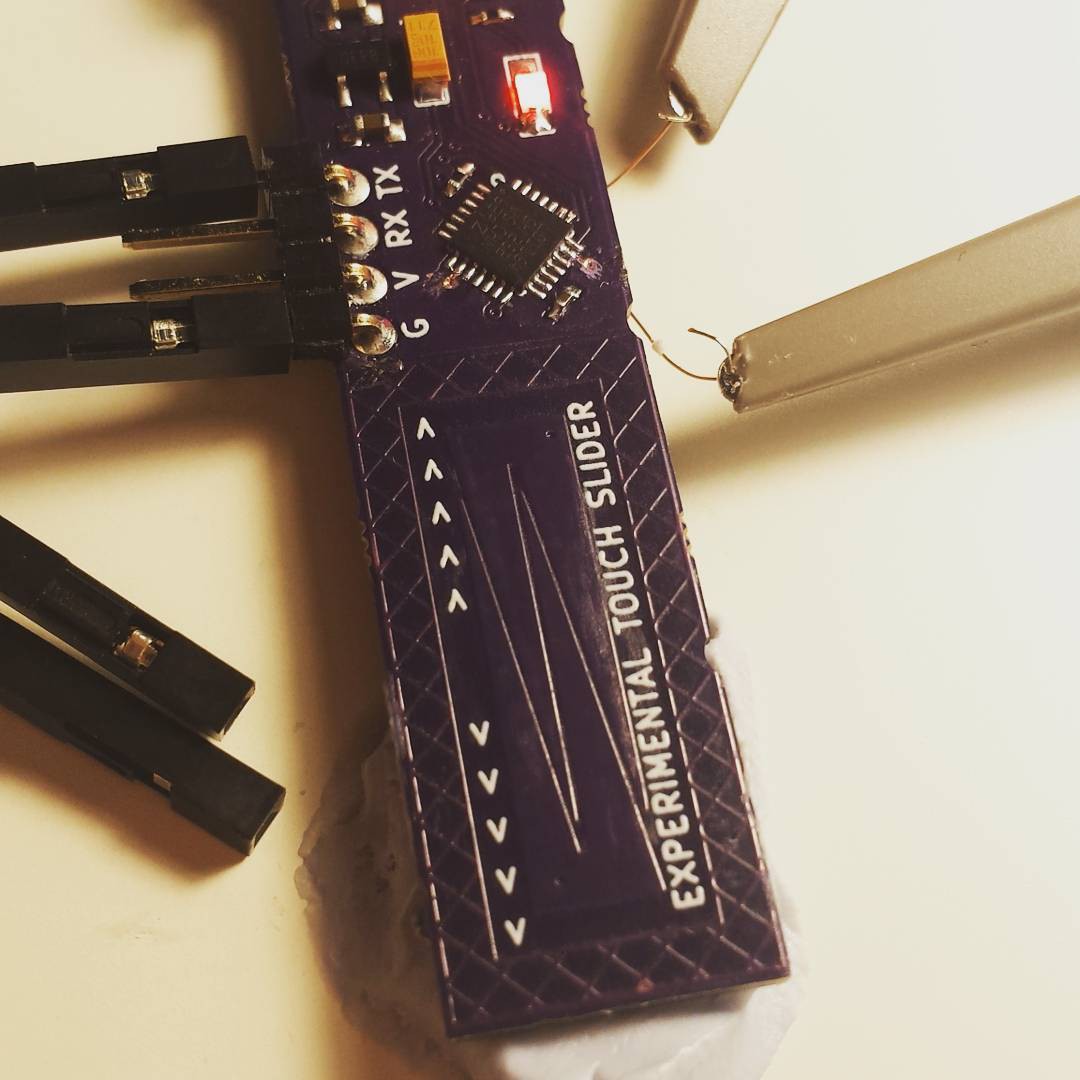
The slider itself is roughly 20mm long, and connects to a pair of GPIOs on the STM32L. Otherwise, the pins float entirely -- even the ground plane is separated by 2mm and constructed of a low-density grid, all in an effort to reduce parasitic capacitance to ground. When a user touches one of the pads, the capacitance to ground increases; since this effect is related to the contact area on the pad, using the triangular design shown above means the capacitance increase varies linearly as the user swipes their finger along the control. I should mention here that the design of these pads (and the underlying concept generally) can be found in many places, including ST's Touch Sense Design Guide. Other manufacturers have similar white papers; just keep in mind that they're usually written around a touch sensing peripheral, which my cheap-o-edition chips certainly do not include. It's okay, we don't need a fancy peripheral to handle touch input, especially if we aren't putting a barrier in front of the PCB itself:
We are dealing with quite low capacitance here, to the point that connecting my 15 pF oscilloscope probes to de-tented vias dramatically changes the circuit's response. Measuring this change with the microcontroller is actually quite simple, and is explained nicely on the Arduino implementation website. Rather than using the unrolled loop method described in that code, I made use of the TIM21 input capture peripheral as follows:
- Set Touch Sensor 0 as an input and activate the pulldown resistor.
- Start TIM21 at clock speed and tell it to stop counting when the Touch Sensor 0 pin goes high.
- Activate the Touch Sensor 0 pullup resistor.
- Wait a few cycles to ensure that the pin went high.
- Record the TIM21 counter value.
- Repeat steps 1-5 for Touch Sensor 1.
- The touched location on the strip will be proportional to the difference between the two counter values, zeroed in the center.
In practice, and with the pullup values and parasitic/body capacitance my setup produces, I found that the total time differential to be around 1.5 microseconds. At the current (relatively low) processor clock rate, that gives me ~3 bits of position resolution which should be more than adequate for our purposes. I suspect adding external components (particularly larger pullups/pulldowns triggered by other GPIOs) could increase the time differential a bit and allow one to eek out more resolution without a faster clock, but that would require more BOM lines!
The code is here if you'd like to take a gander or use it in your own project (GPL v3); we're using libopencm3 along with a few hacks to get the TIM21 peripheral up, which we'll PR to the main project at some point once we have the library updated. All of the touch slider stuff is pretty well self-contained in main.c under the functions get_touch() and get_slider_position().
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.