Andreas Hoelldorfer
Andreas Hoelldorfer-
2019 Update
05/12/2019 at 16:51 • 2 commentsIt's been 4 years since I started this project. Its had some downs and a lot of ups. Time to give you an update about whats going on.
Notice: "No robots were harmed during making this video."
I post regular updates on my Instagram feed if you are interested in faster updates:
https://www.instagram.com/4ndreash -
Mantis IK in Robot Overlord
05/10/2016 at 16:35 • 2 commentshttps://www.instagram.com/p/BFNmSFqofN_/?taken-by=imakerobots
The link above is a video of the working inverse kinematics. Now I don't have the arm on my desk, so I can't write the firmware that ties the arm to RO. However! RO is ready to connect and talk with Mantis.
My interest is drifting towards easier ways to move the arm in VR. The more I use RO the more I want to fly like an FPS game and push/pull the virtual model rather than click buttons on the side.
-
Robot Overlord support for Mantis
05/04/2016 at 19:23 • 4 comments![]()
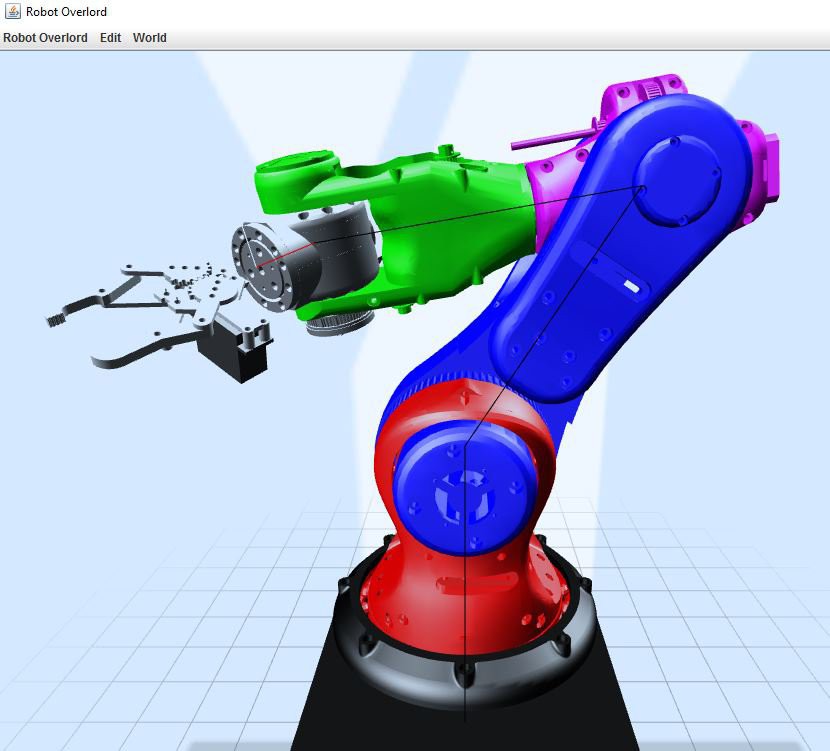
Hello Everybody! Dan Royer here. You may know me from helping such projects as the PancakeBot and the Cypress Umbrella. Glad to be working with @Andreas Hoelldorfer. He's got the hardware and I've got the software, so it will make a good team. Above you see the latest version of Robot Overlord (RO) simulating the Mantis arm. RO is a robot simulation package I've written in Java. Think of it as my One Ring.
First stage was to port the Inventor models into the system and animate them. The line you see running through the model is the software's mental model of the forward kinematics (FK). The FK informs the rendering engine where to draw the parts of the model AND it lets the software check for illegal/impossible arm moves. FK means "if my joints are at these angles, tell me where is the finger tip."
Second stage will be to get the inverse kinematics (IK) working. IK is the other direction - "I know where the finger is, tell me where the joint angles need to be." It will be a naive solution full of singularities because I'm only marginally clever (MC). Sigularities are cases where there may be many valid solutions, and picking an answer is hard for a computer.
Third stage will be firmware to make this arm talk with RO like all MC robots.
More generally, MC is working on adding Vive VR support and record/playback to RO. That will mean telepresence work, gamification, and more.
Dan out!
-
I started with a new version called Mantis
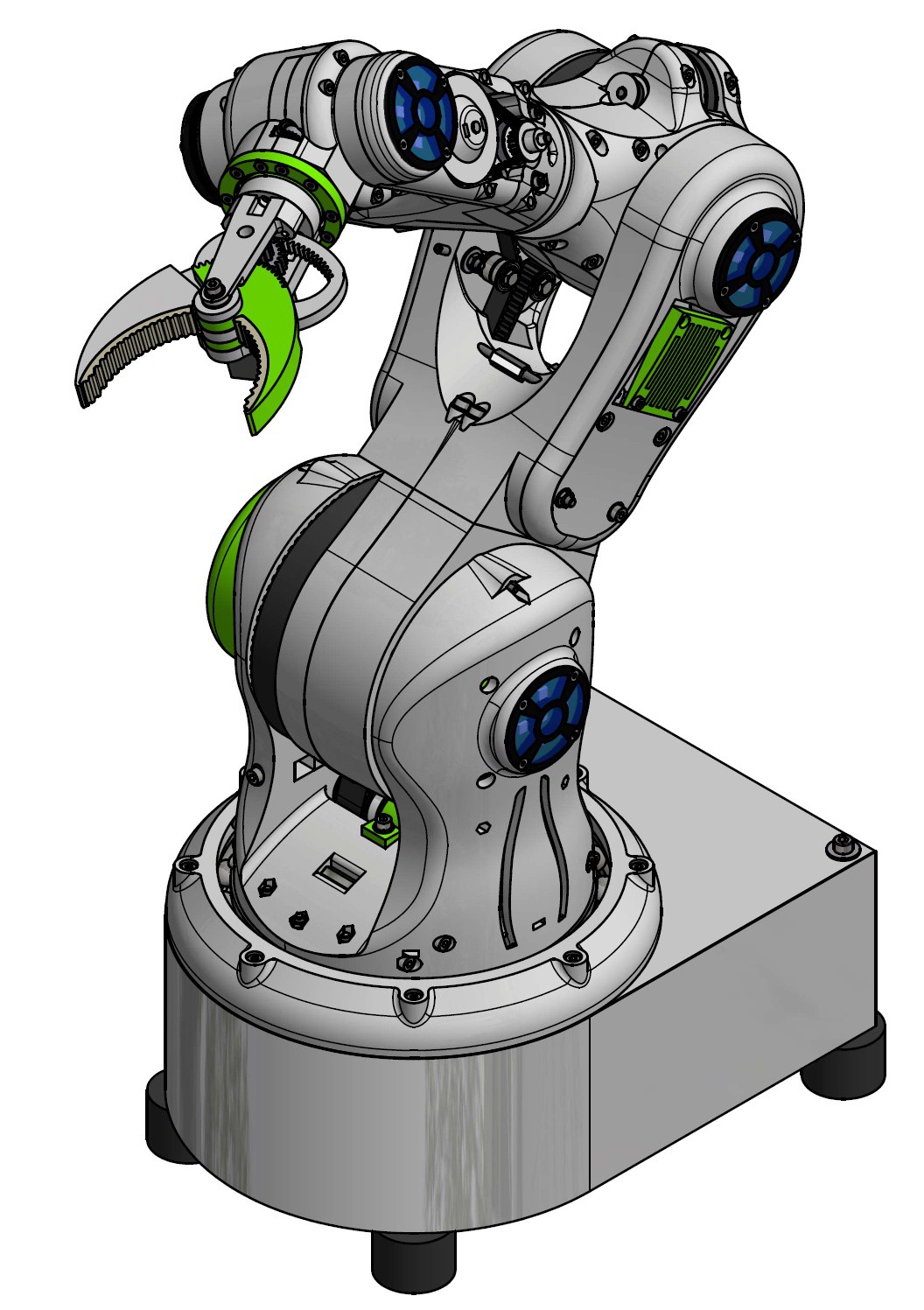
04/13/2016 at 08:11 • 0 commentsAfter version 4 (green) works quite well. I decided to stick with the basic design and improve this version instead of trying another approach.
I started with the Gripper and will work from top to bottom down the robot arm
http://chaozlabs.blogspot.com/2016/04/mantis-robot-arm-part-1-gripper.html
I will post a video about the part and a small article on my blog where all the links and part lists will be.
![]()
-
Still here
02/29/2016 at 17:32 • 2 commentsI just posted a update about my 3d printed, 6-axis robot arm project:
-
All in motion
10/19/2015 at 07:24 • 5 commentsAll six axis of my robot arm are moving now:
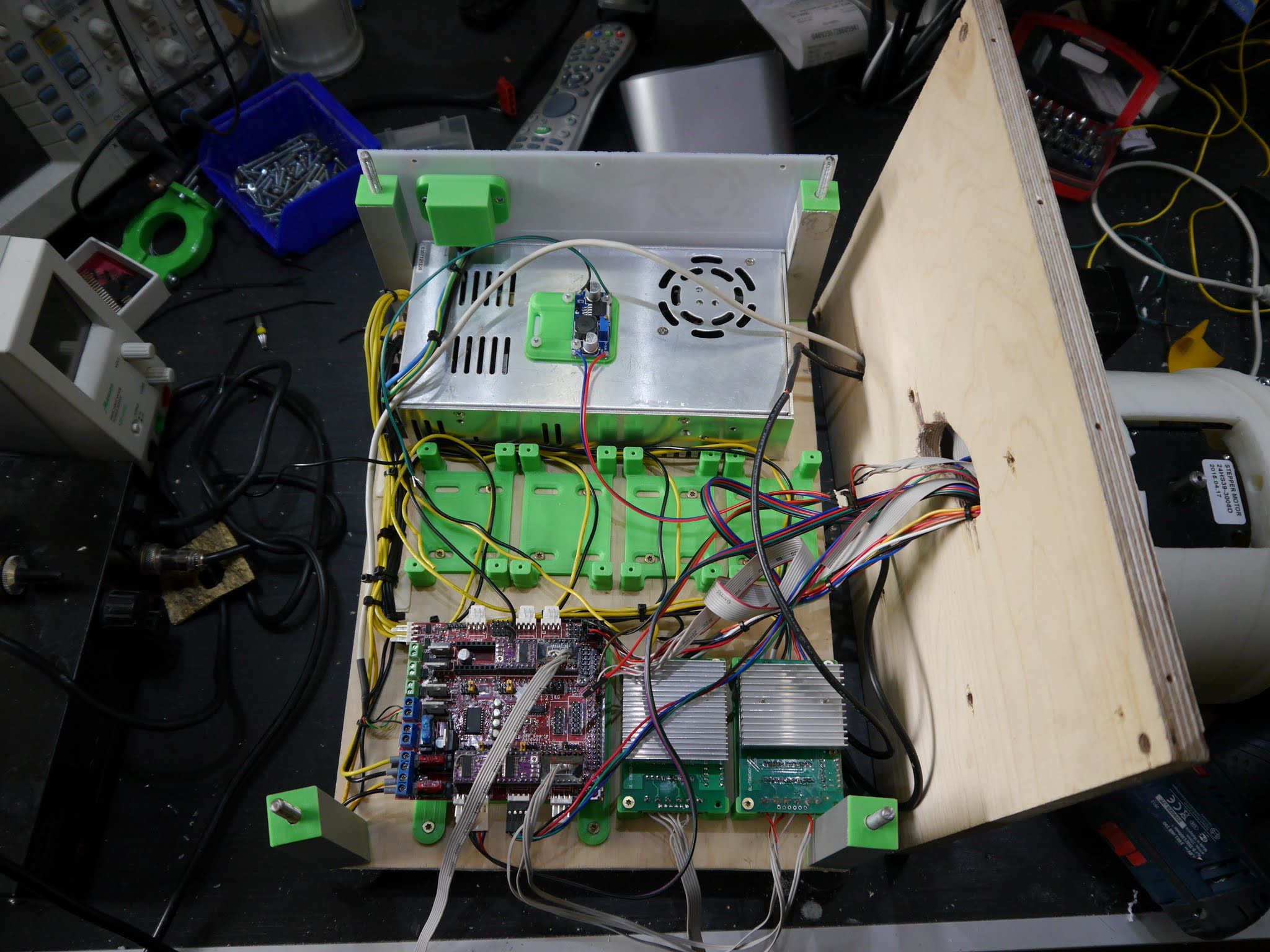
I build a case for the electronics, nothing special but it will serve the puropse.
![]()
![]()
-
3-Axis running and detailed description of the arm.
10/04/2015 at 09:55 • 1 comment -
Working on Version 4 - Progress
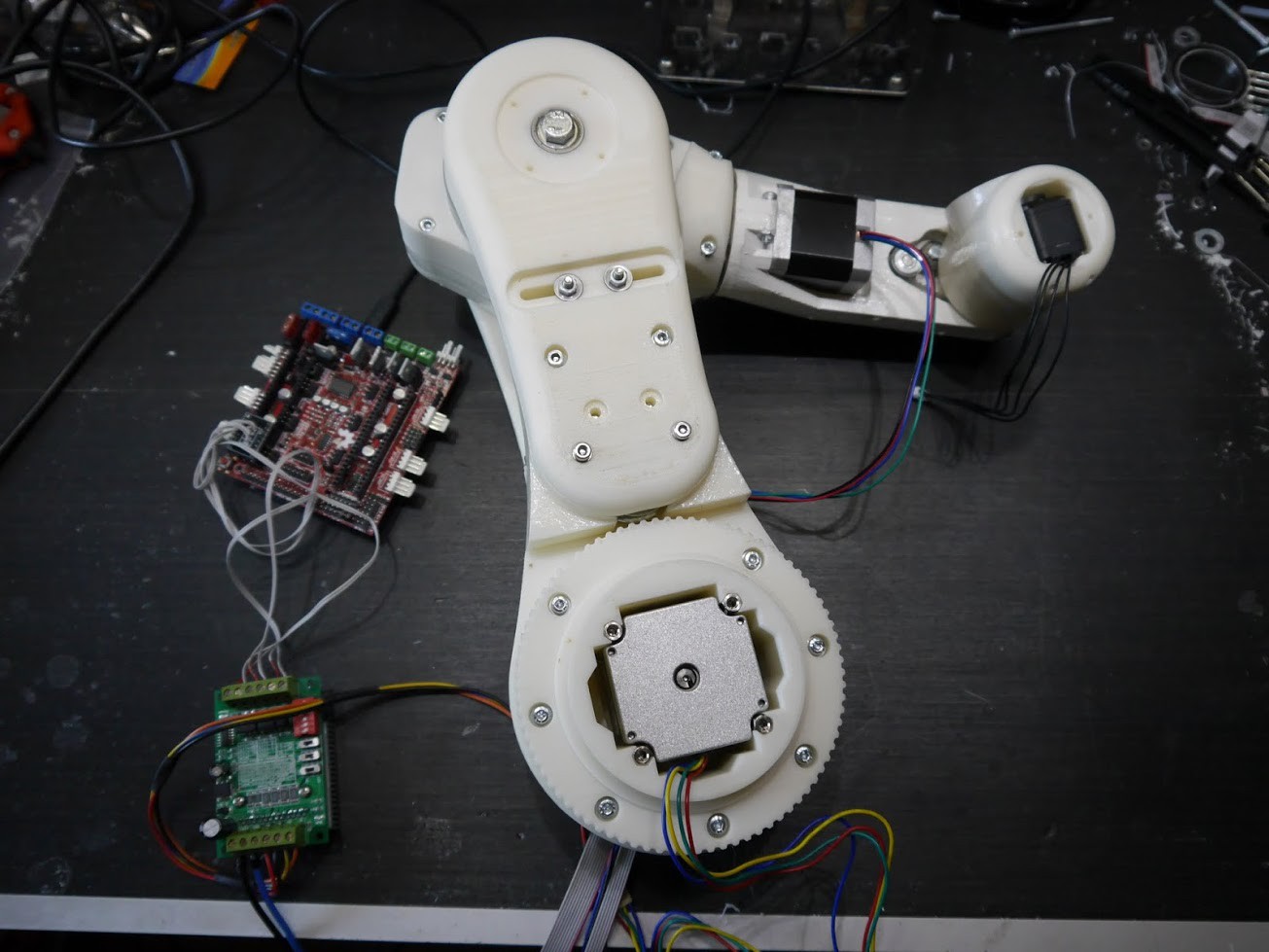
09/24/2015 at 12:47 • 3 comments![]()
I use now Nema23 steppers a high power stepper driver and a Arduino Due board with a Ramps-FD shield. I plan to build my own shield but this have to wait a little bit. I defiantly will stick to the Arduino Due. For now the Ramps-FD shield works fine and its quite cheap (25€).
Currently I'm waiting for the large bearings to arrive, they are not so easy to find. In the meantime I started wiring all up, the cable tubes inside seams to work this time so less ugly cables.
Everything looks very pomising now I'm very happy with the new design and looking forward to the all in action.
The only thing left is the rotating base. I try to get the construciton done this weekend.
I also uploaded step files on github so you can take a look on the arm.
https://github.com/4ndreas/BetaBots-Robot-Arm-Project/tree/master/Green/step
Also all other inventor files are online.
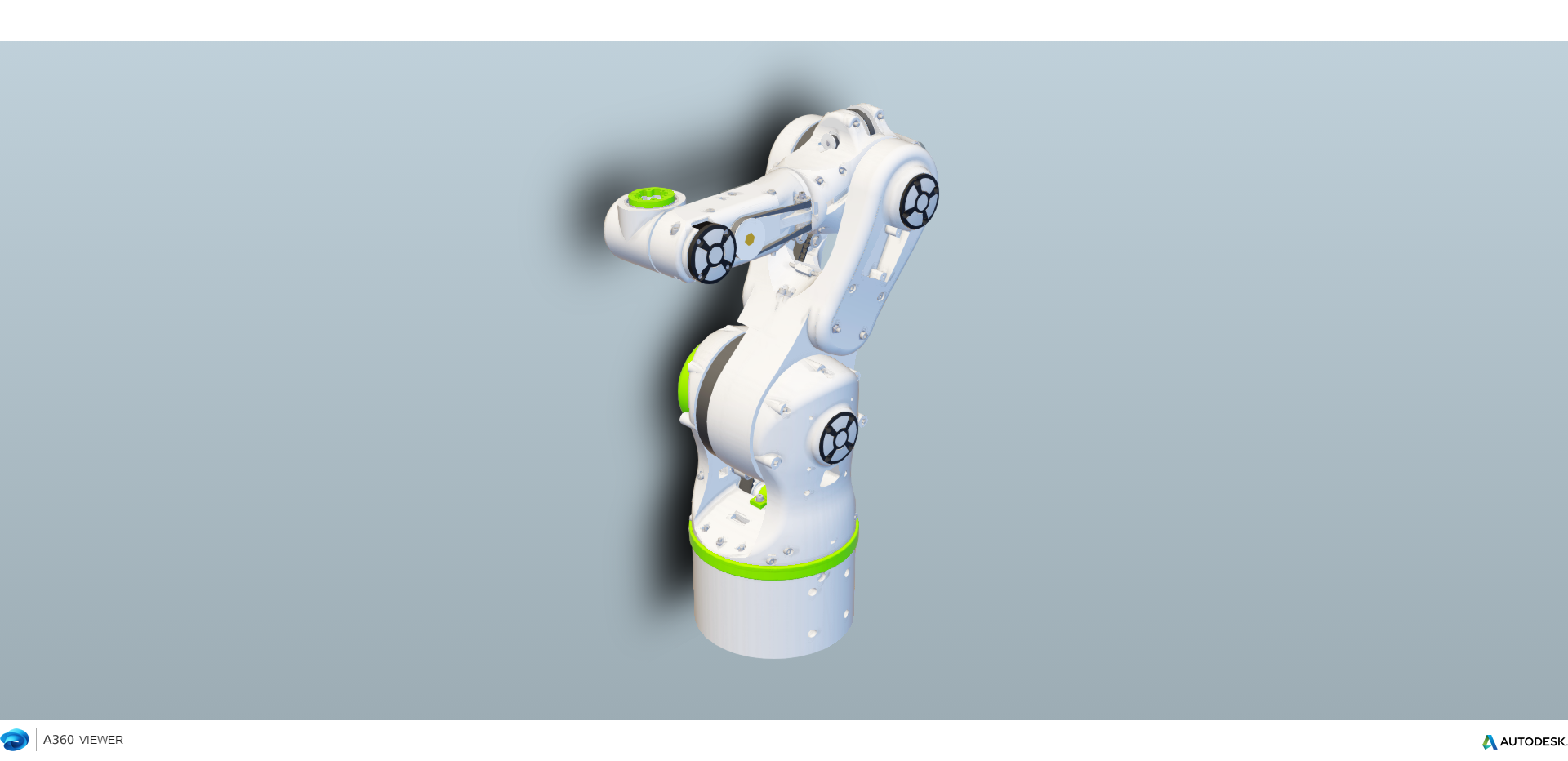
For those who have no CAD I uploaded the robot A360Viewer an online cad viewer:
![]() I tried Onshape but it had a problem viewing all the parts???
I tried Onshape but it had a problem viewing all the parts???I regularly upload pictures in this here:
-
Working on version 4
09/19/2015 at 11:36 • 6 commentsHere is my new Video of the robot arm project:
I also started uploading the cad files on github:
https://github.com/4ndreas/BetaBots-Robot-Arm-Project
Still a mess I try to clean it up in the next weeks.
-
Working on Version 4
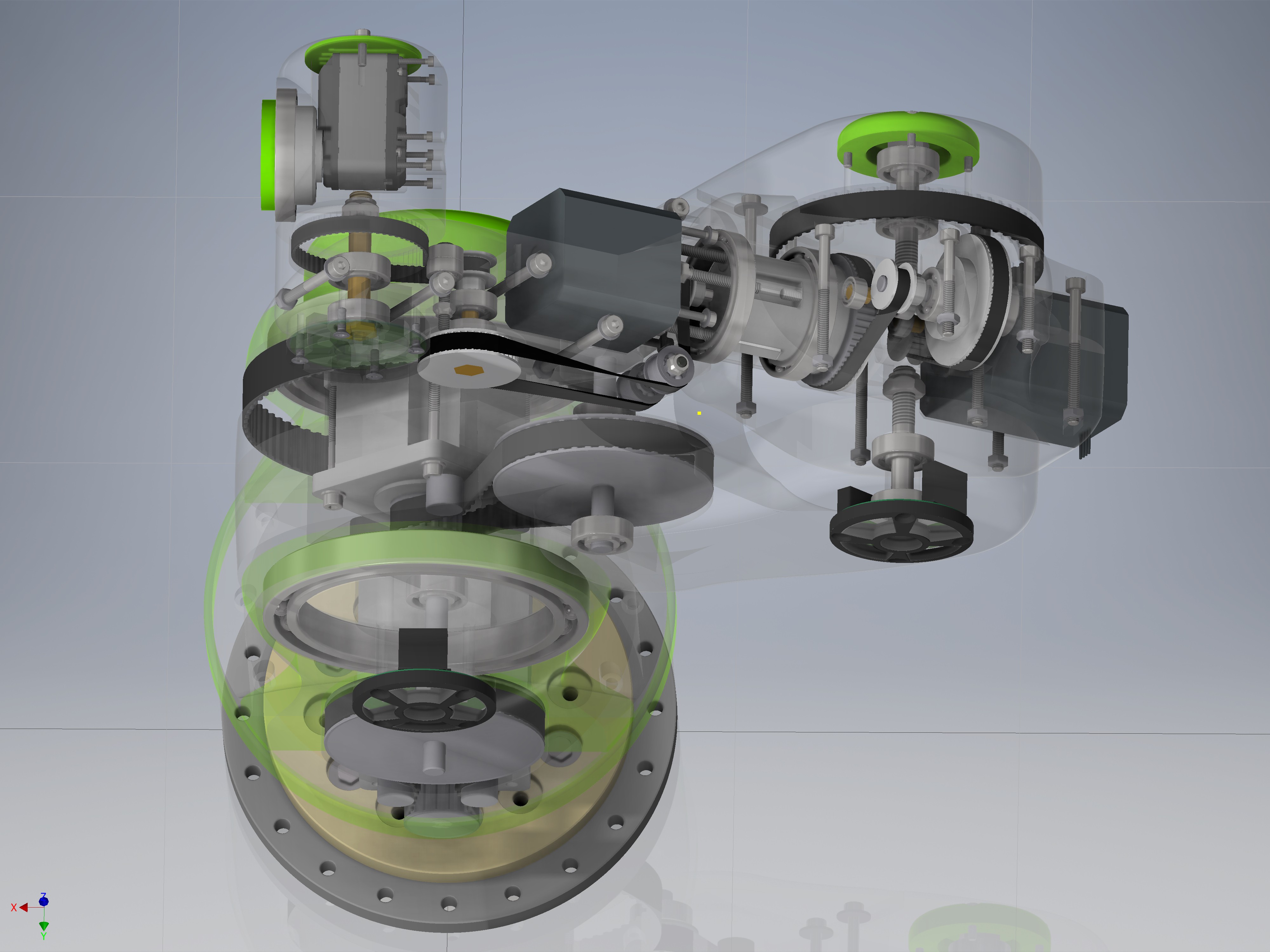
09/11/2015 at 20:46 • 9 commentsI'm working on a new version based on the experience I made with the previous versions.
The plan is to use stepper motors and timing belt gears.
The plan is to use a Nema23 stepper for the rotary base,
Joint one and two will be Nema24 ( this: http://www.omc-stepperonline.com/dual-shaft-cnc-stepper-motor-nema-24-100mm-4nm566-ozin-24hs393008d-p-388.html )
Joint 3 and 4 Regular Nema17 stepper and for the 5 joint a HerkuleX DRS-0101 .
But nothing is final now.
Power supply will be 24V-36V I guess.
![]()
![]()
![]()
![]()
3D Printable Robot Arm
A printable robot arm, a little bigger than the usual hobby servo once.