 KMD
KMDI decided the best way to go about this is to build a test bed from a similar cheap frame, add all the components I have, fly it for a while and draw up the pro/cons and see whats missing and what can be improved with a custom frame build.
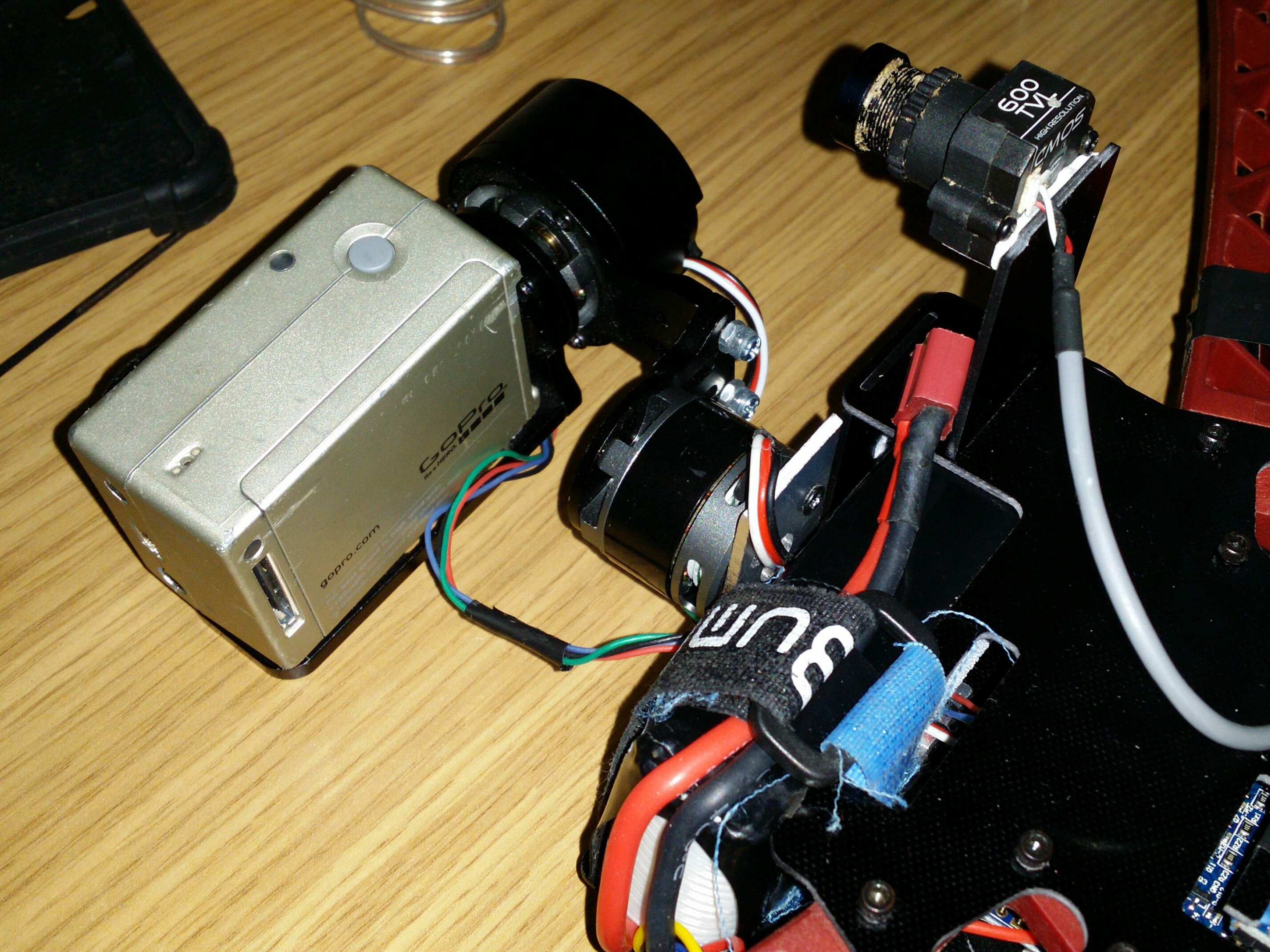
For this purpose I am using the Reptile 500 frame. The only custom part to this build is an L shaped piece of aluminium to mount the gimbal on.
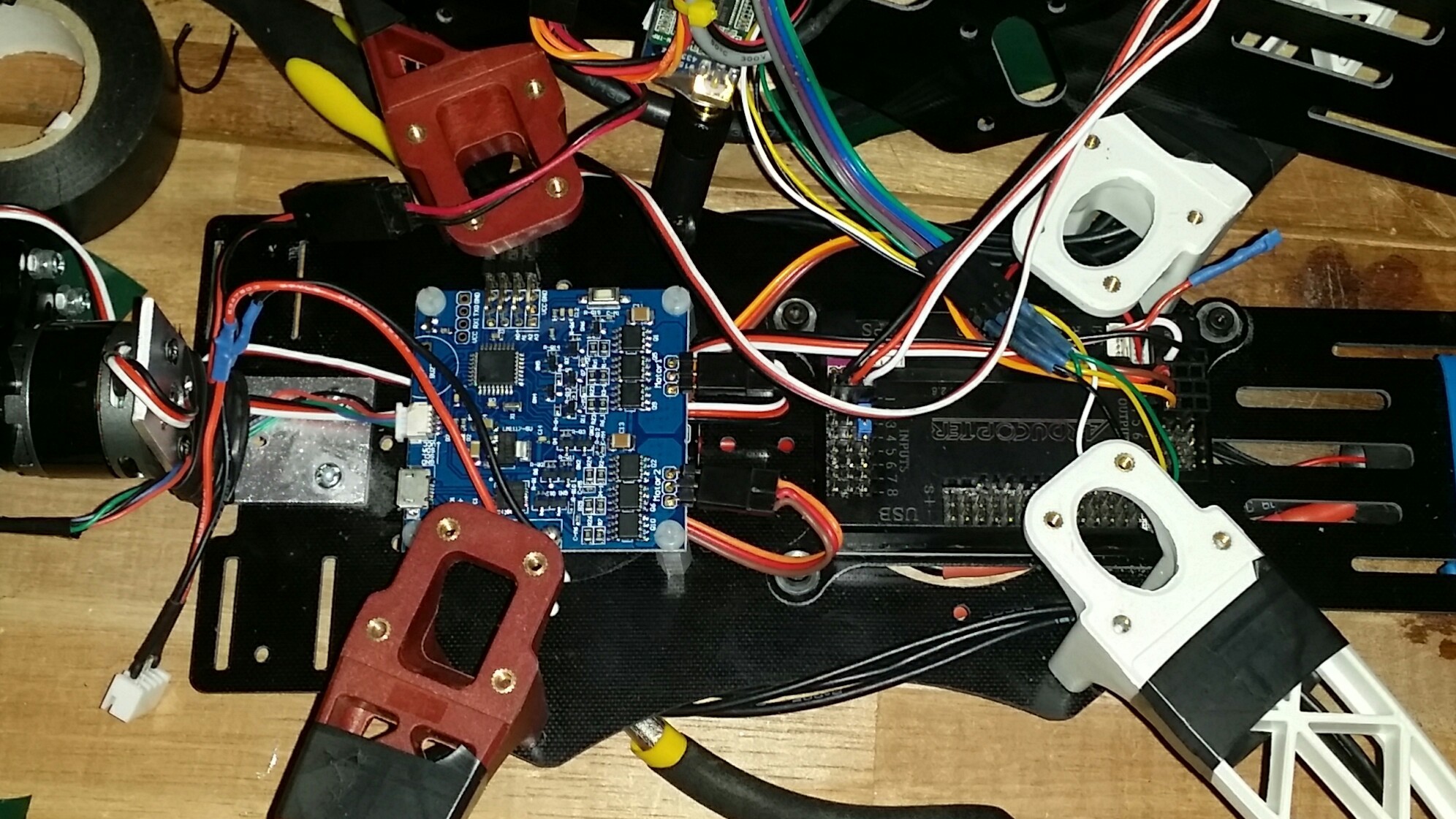
The Gimbal controller is on the left, APM on the right and the Q-Brain Quad ESC is mounted beneath the Gimbal board.
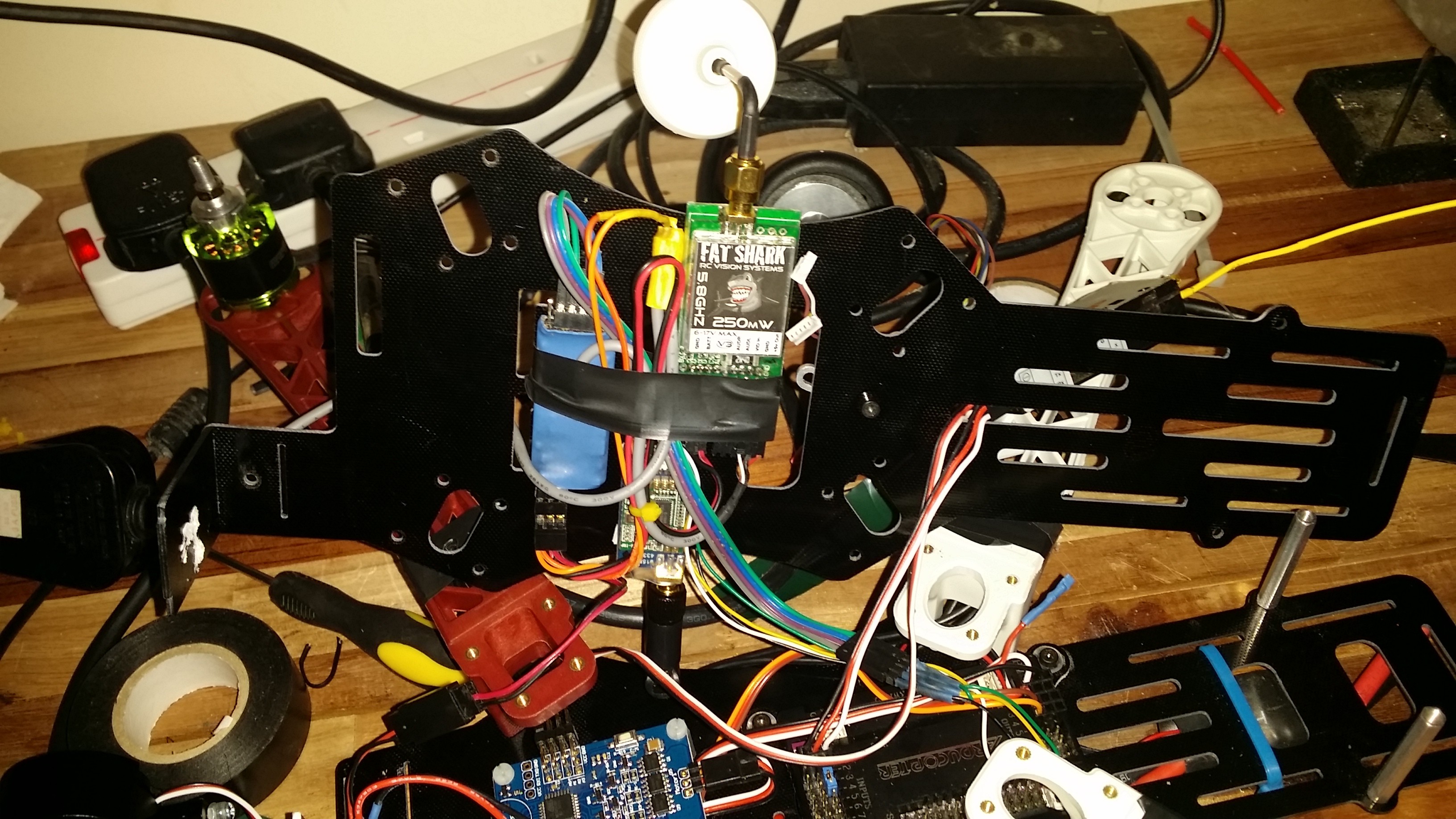
Beneath the top plate is the FatShark TX, OSD and 433Mhz Telemetry modules.
There is a 2200mah 3S in the front to power the Gimbal and FPV gear. This seems a bit over the top but it balances perfectly with the 4ah 4S in the back.
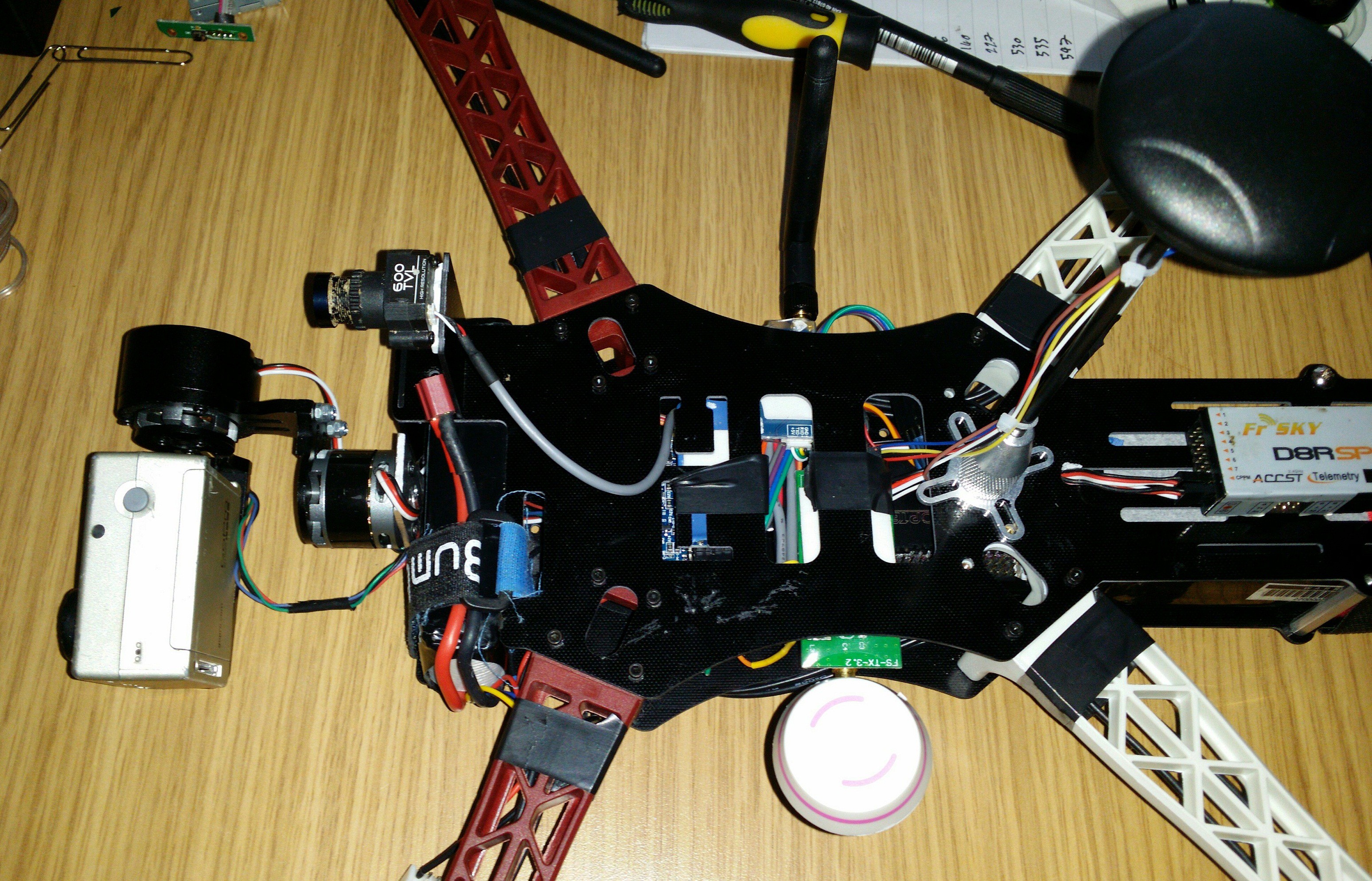
The top plate is left clear exept for the RX and GPS/Mag pole.
Given that everything is mounted quite firmly (including the gimbal) I'm hopeful that the Arducopter "Auto-Tune" function will work quite well and I won't have to spend a lot of time tuning the board before I can do some good test flights.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.