 Christoph
ChristophI tried to set up Code::Blocks to use libopencm3, which was not that hard, after all. It's just a lot of work, but it can be stored as a template! This post might appear to be very long, but about 90% of it are screenshots, and cut 'n paste code.
Sources of information
- Compiler and library readme. I'm using GCC ARM Embedded 4.9-2015-q2-update
- Code::Blocks forum and wiki (for setting up the compiler)
- libopencm3 wiki and examples
First of all I downloaded and compiled libopencm3 according to their instructions, with a custom destination directory. This left me with a set of chip libraries (opencm3_stm32f0 and many more for other chips) to be included in my project. I also have the compiler configured already. So here are a few screenshots of my C::B setup.
Create an empty project (File->New->Project):
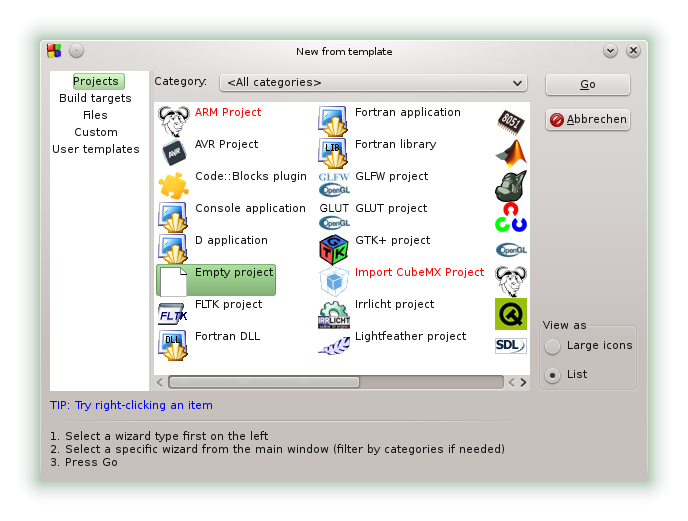
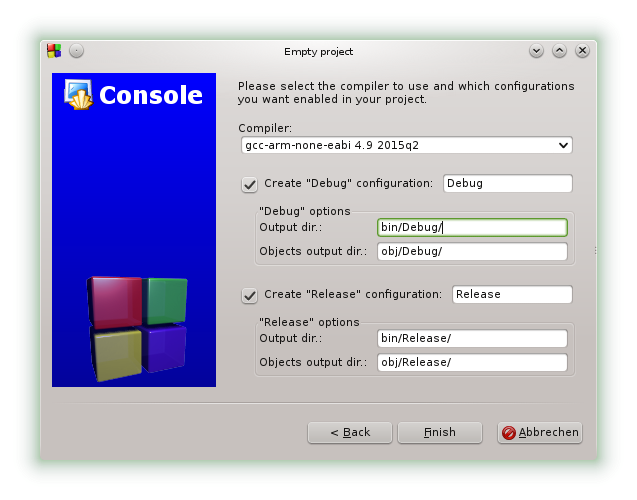
Hit go and enter your project's title and filename. Select your arm-none-eabi-gcc when asked for a compiler, and hit finish (this automatically creates debug and release configurations):
Code
Create a main.cpp (File->New->Empty File or CTRL-Shift-N) and add it to the project. Mine looks like this (based on code taken from one of the STM32F0 examples from https://github.com/libopencm3/libopencm3-examples/blob/master/examples/stm32/f0/stm32f0-discovery/systick_blink/systick_blink.c):
#include <libopencm3/stm32/rcc.h>
#include <libopencm3/stm32/gpio.h>
#include <libopencm3/cm3/nvic.h>
#include <libopencm3/cm3/systick.h>
/* PB1 is connected to the onboard LED on the STM32F030F4P6 breakout board. */
#define PORT_LED_ONBOARD GPIOB
#define PIN_LED_ONBOARD GPIO1
/* Called when systick fires */
void sys_tick_handler(void)
{
gpio_toggle(PORT_LED_ONBOARD, PIN_LED_ONBOARD);
}
/* Set up timer to fire freq times per second */
static void systick_setup(int freq)
{
systick_set_clocksource(STK_CSR_CLKSOURCE_AHB);
/* clear counter so it starts right away */
STK_CVR = 0;
systick_set_reload(rcc_ahb_frequency / freq);
systick_counter_enable();
systick_interrupt_enable();
}
/* set STM32 to clock by 48MHz from HSI oscillator */
static void clock_setup(void)
{
rcc_clock_setup_in_hsi_out_48mhz();
/* Enable clocks to the GPIO subsystems */
rcc_periph_clock_enable(RCC_GPIOB);
}
static void gpio_setup(void)
{
gpio_mode_setup(PORT_LED_ONBOARD, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, PIN_LED_ONBOARD);
}
int main(void)
{
clock_setup();
gpio_setup();
/* setup systick to generate 2 LED flashes per second */
systick_setup(4);
/* Do nothing in main loop */
while (1);
}
Compiler and Linker flags
Now comes the trickier part: Set up flags for the compiler and the linker. Go to Project->Build options and select the top-level entry, which has options for all sub-targets (debug and release):
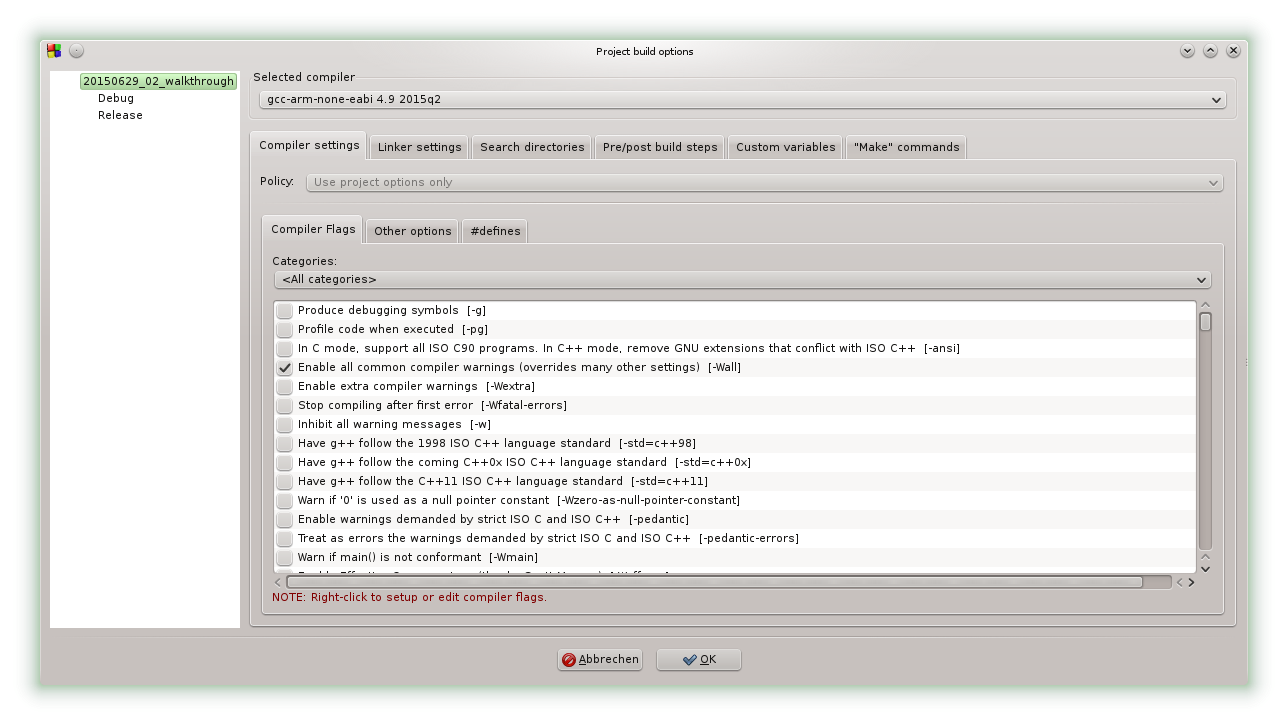
My compiler flags in the "Compiler Settings" tab, combined from the tabs "Compiler Flags" and "Other options", are:
-Wall -pedantic -mlittle-endian -msoft-float -mthumb -mcpu=cortex-m0 -ffunction-sections -fdata-sections -fno-exceptionsand one define in the "#defines" tab:
STM32F0Now for the linker ("Linker settings" tab):
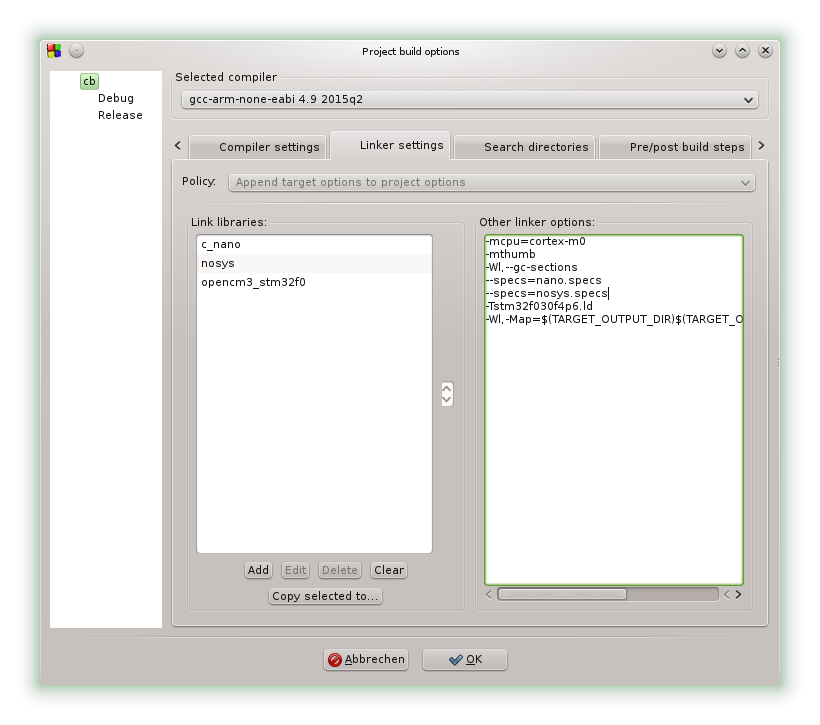
That is in the "Link libraries" list:
c_nano nosys opencm3_stm32f0and in the "Other linker options":
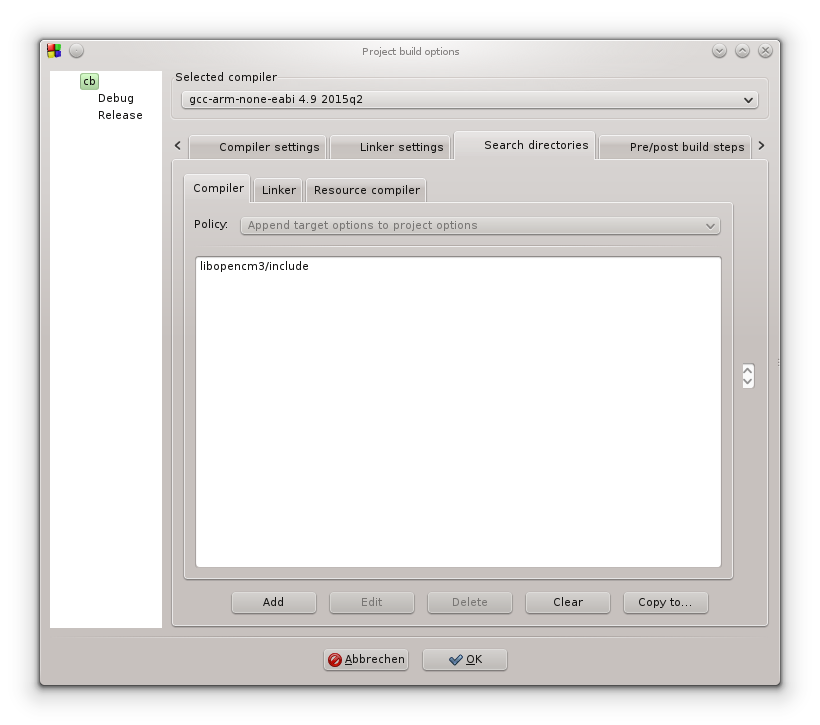
-mcpu=cortex-m0 -mthumb -Wl,--gc-sections --specs=nano.specs --specs=nosys.specs -Tstm32f030f4p6.ld -Wl,-Map=$(TARGET_OUTPUT_DIR)$(TARGET_OUTPUT_BASENAME).map,--crefSearch Directories for the compiler:
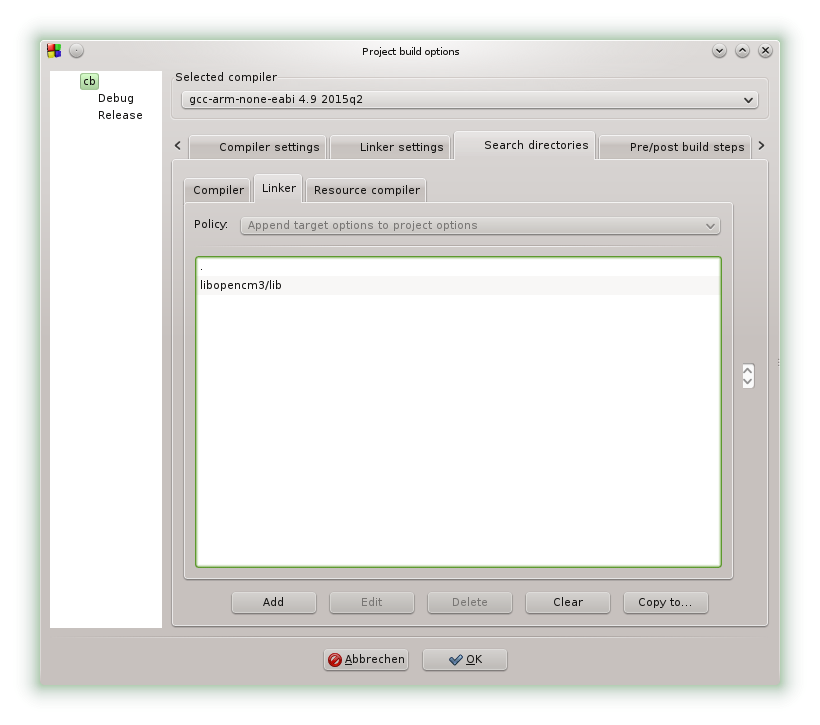
For the linker:
We're almost there, just some fine-tuning after the build is finished:
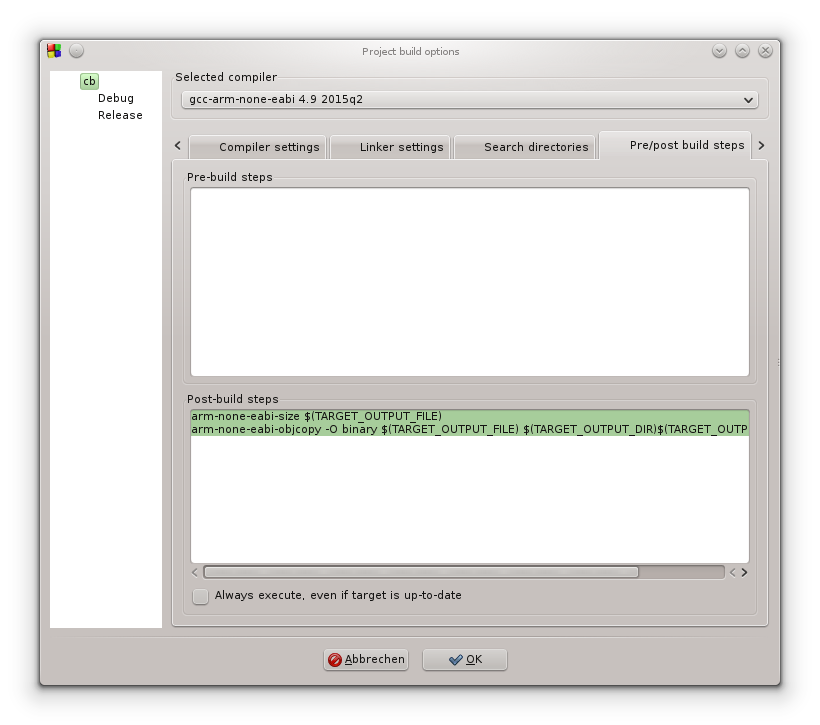
arm-none-eabi-size $(TARGET_OUTPUT_FILE) arm-none-eabi-objcopy -O binary $(TARGET_OUTPUT_FILE) $(TARGET_OUTPUT_DIR)$(TARGET_OUTPUT_BASENAME).binNow you can also add extra flags for debug and release builds (generate debugging symbols, or strip symbols and optimize, whatever you need).
Linker script
This was a bit harder, because libopencm3 has some kind of automatic linker script generation magic built in. I couldn't use that from within Code::Blocks, so I cobbled together my own from their template and chip data file. Note that I did this without any notable experience with linker scripts, I just try and see what happens.
This one worked indeed, because blinky.
stm32f030f4p6.ld in the project root directory:
MEMORY
{
rom (rx) : ORIGIN = 0x08000000, LENGTH = 16K
ram (rwx) : ORIGIN = 0x20000000, LENGTH = 4K
}
/* Enforce emmition of the vector table. */
EXTERN (vector_table)
/* Define the entry point of the output file. */
ENTRY(reset_handler)
/* Define sections. */
SECTIONS
{
.text : {
*(.vectors) /* Vector table */
*(.text*) /* Program code */
. = ALIGN(4);
*(.rodata*) /* Read-only data */
. = ALIGN(4);
} >rom
/* C++ Static constructors/destructors, also used for __attribute__
* ((constructor)) and the likes */
.preinit_array : {
. = ALIGN(4);
__preinit_array_start = .;
KEEP (*(.preinit_array))
__preinit_array_end = .;
} >rom
.init_array : {
. = ALIGN(4);
__init_array_start = .;
KEEP (*(SORT(.init_array.*)))
KEEP (*(.init_array))
__init_array_end = .;
} >rom
.fini_array : {
. = ALIGN(4);
__fini_array_start = .;
KEEP (*(.fini_array))
KEEP (*(SORT(.fini_array.*)))
__fini_array_end = .;
} >rom
/*
* Another section used by C++ stuff, appears when using newlib with
* 64bit (long long) printf support
*/
.ARM.extab : {
*(.ARM.extab*)
} >rom
.ARM.exidx : {
__exidx_start = .;
*(.ARM.exidx*)
__exidx_end = .;
} >rom
. = ALIGN(4);
_etext = .;
.data : {
_data = .;
*(.data*) /* Read-write initialized data */
. = ALIGN(4);
_edata = .;
} >ram AT >rom
_data_loadaddr = LOADADDR(.data);
.bss : {
*(.bss*) /* Read-write zero initialized data */
*(COMMON)
. = ALIGN(4);
_ebss = .;
} >ram
/*
* The .eh_frame section appears to be used for C++ exception handling.
* You may need to fix this if you're using C++.
*/
/** DISCARD/ : { *(.eh_frame) } */
. = ALIGN(4);
end = .;
}
PROVIDE(_stack = ORIGIN(ram) + LENGTH(ram));
Note that the .eh_frame section is not discarded (it is by default).Hit build (or CTRL+F9) and you should be rewarded with binaries in the target/bin directory. You can now program your target board with the programmer of your choice. It's also possible to include the programming in the post-build steps or to configure it as a tool to be accessed in the C::B tools menu.
I hope this helps some people!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
How to build libopencm3 lib? Help me, please?
Are you sure? yes | no