0%
0%
Urban Red Fox Tracking Project
To build a low cost tracking system without GPS for Animals and Human Animals.
 Brenda Armour
Brenda ArmourBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
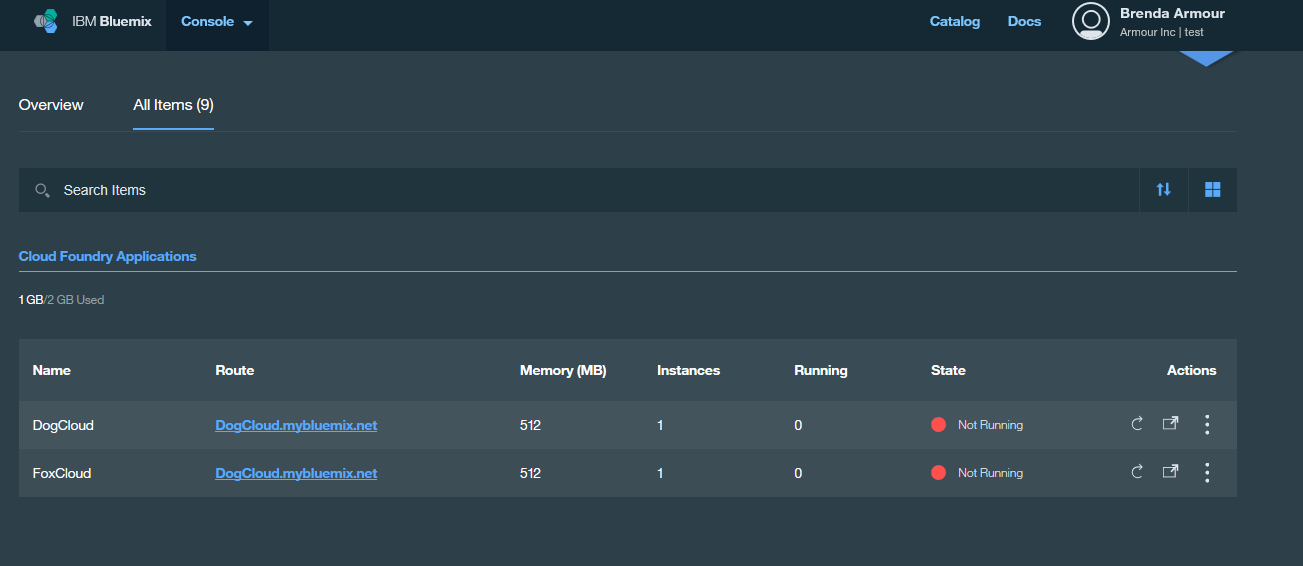 The project will still continue. One of the challenges will be to test the code which I could not do this weekend. My backup nodes were on the Node Red page. Which I cannot reach. If I click on a route , I receive a message Page Cannot Be Displayed :C
The project will still continue. One of the challenges will be to test the code which I could not do this weekend. My backup nodes were on the Node Red page. Which I cannot reach. If I click on a route , I receive a message Page Cannot Be Displayed :C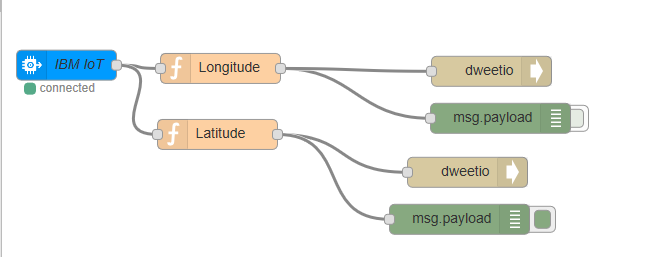


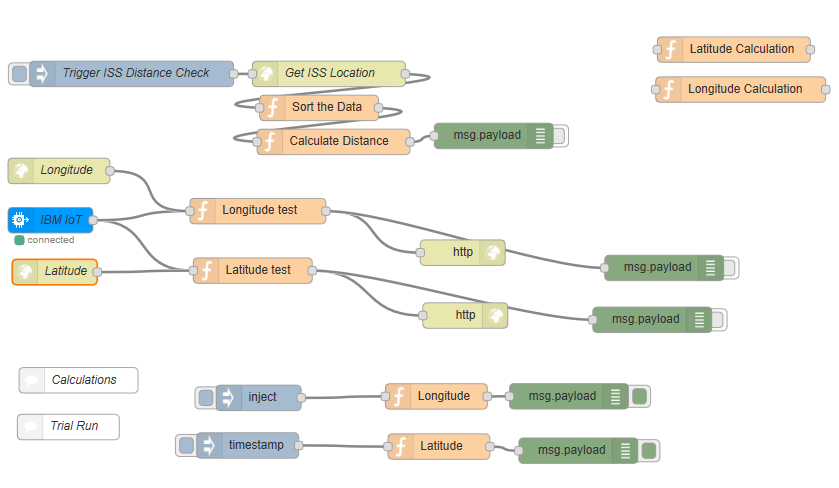
 My next log will explain more of the math behind the calculations and the Dashboard.
My next log will explain more of the math behind the calculations and the Dashboard.


 Laurence
Laurence

 staticdet5
staticdet5
Yes I seem to have missed the first message. You can contact me at armour999@gmail.com. I check my email all the time.
Thanks
Brenda