0%
0%
Navio+ Raspberry Pi autopilot
Control any drone directly from Rasberry Pi
 Igor Vereninov
Igor VereninovBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Himanshu Dada
Himanshu Dada
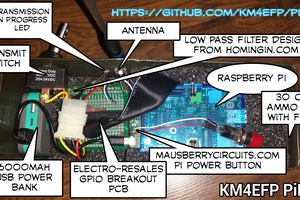
 KM4EFP
KM4EFP
 patrickpoirier51
patrickpoirier51
Hello, I am working on something similar. Navio2+Raspberry +camera to autonomously command a drone.