0%
0%
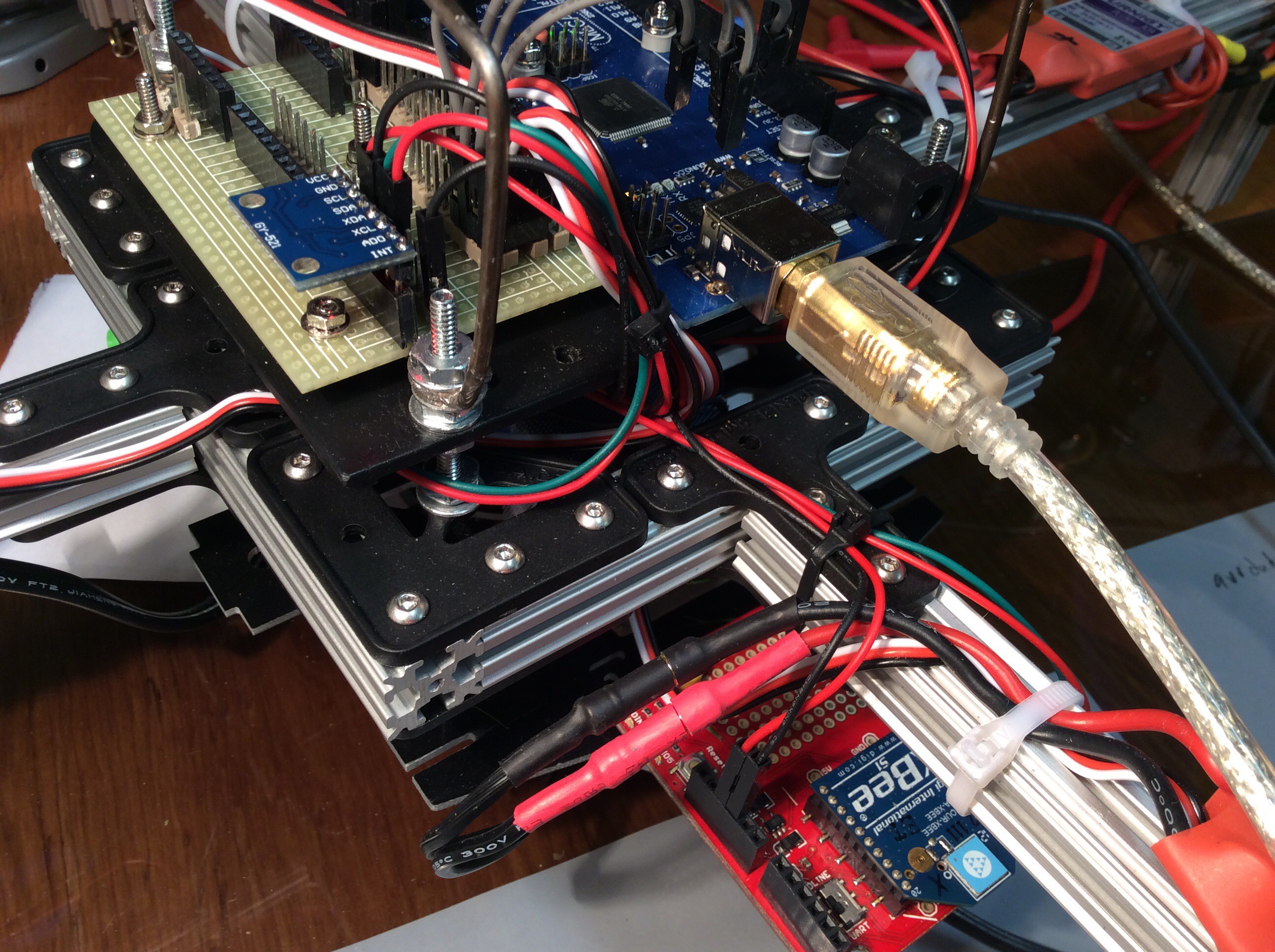
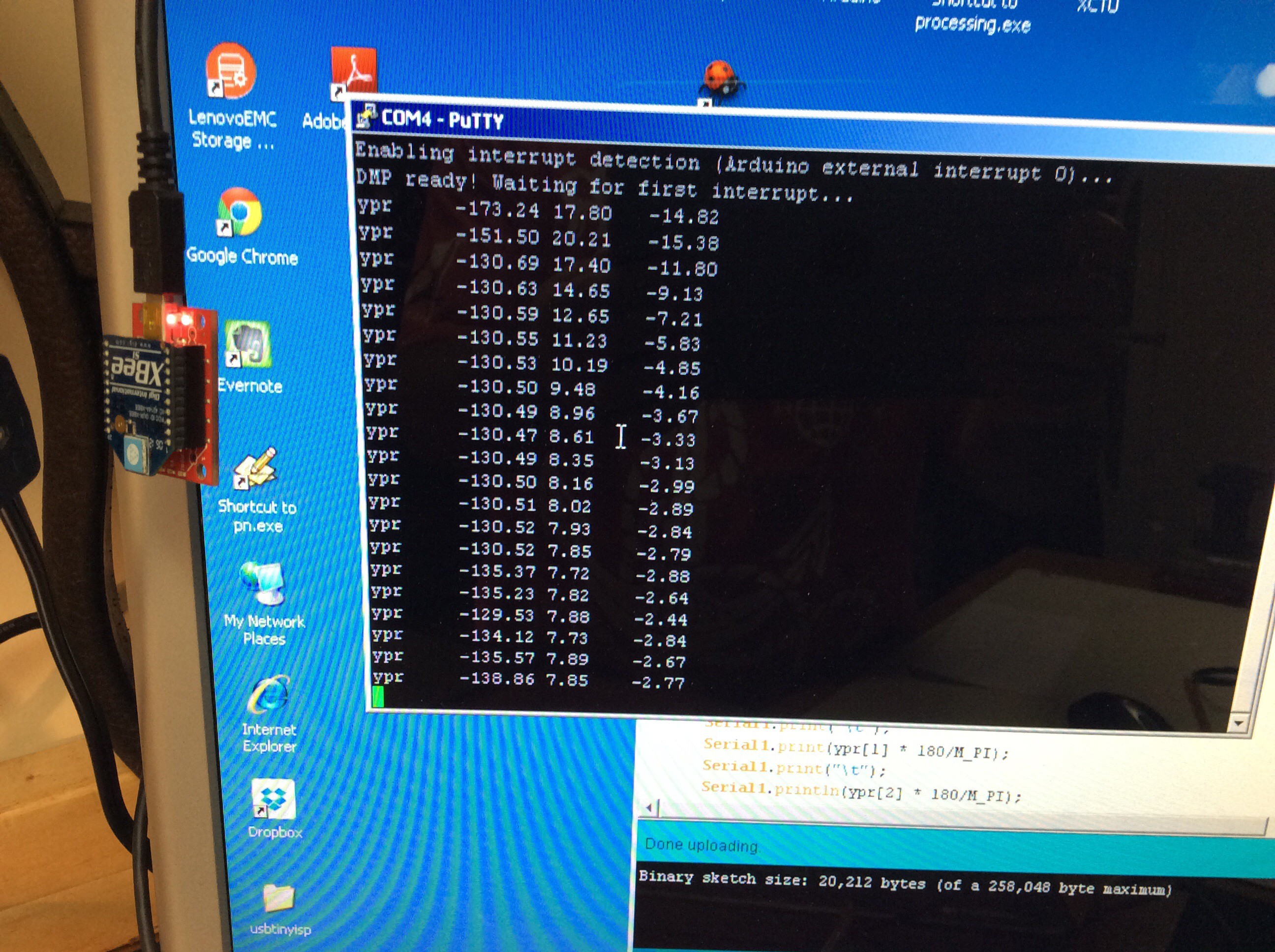
Yet another quadcopter (YAQC)
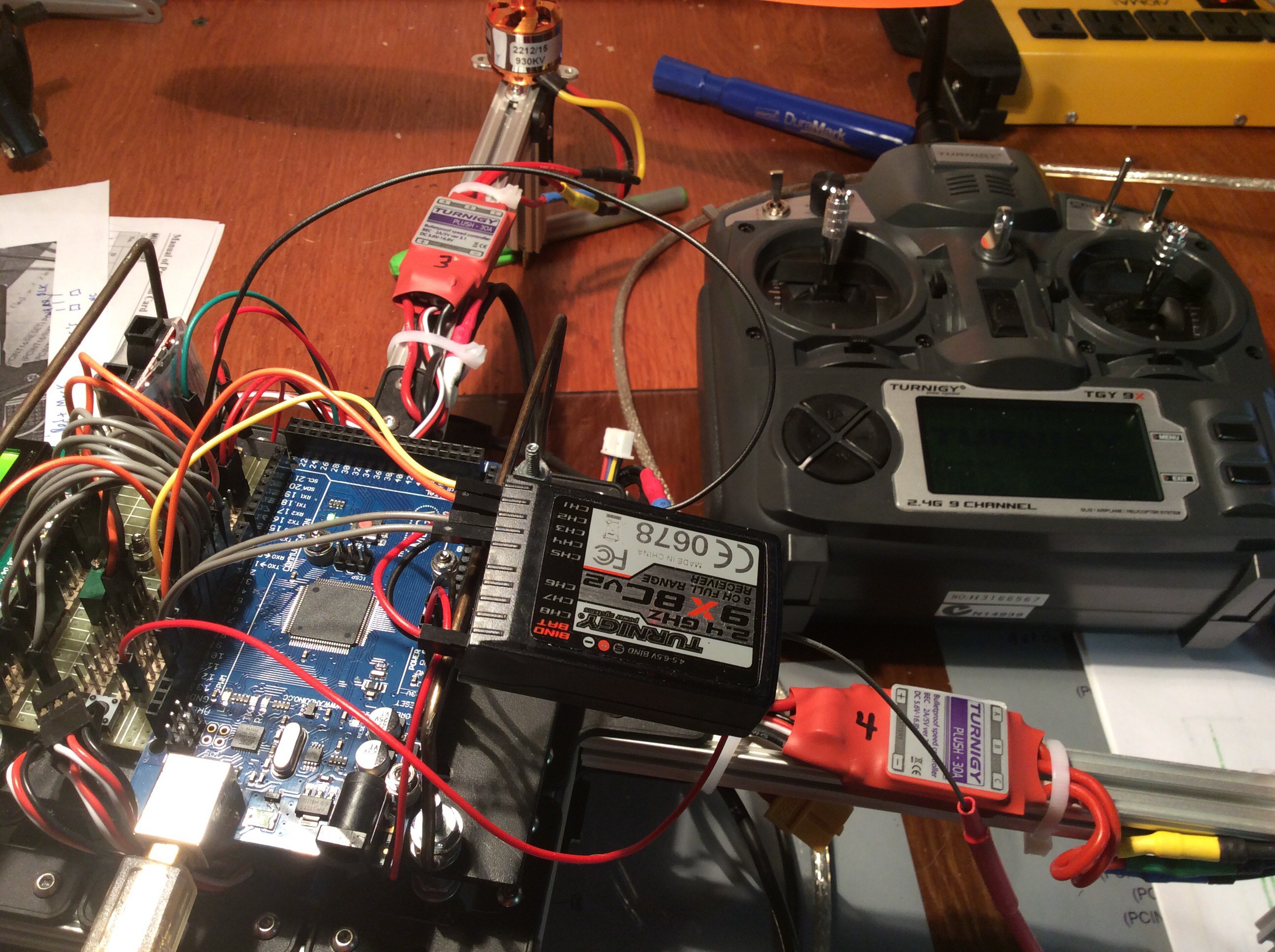
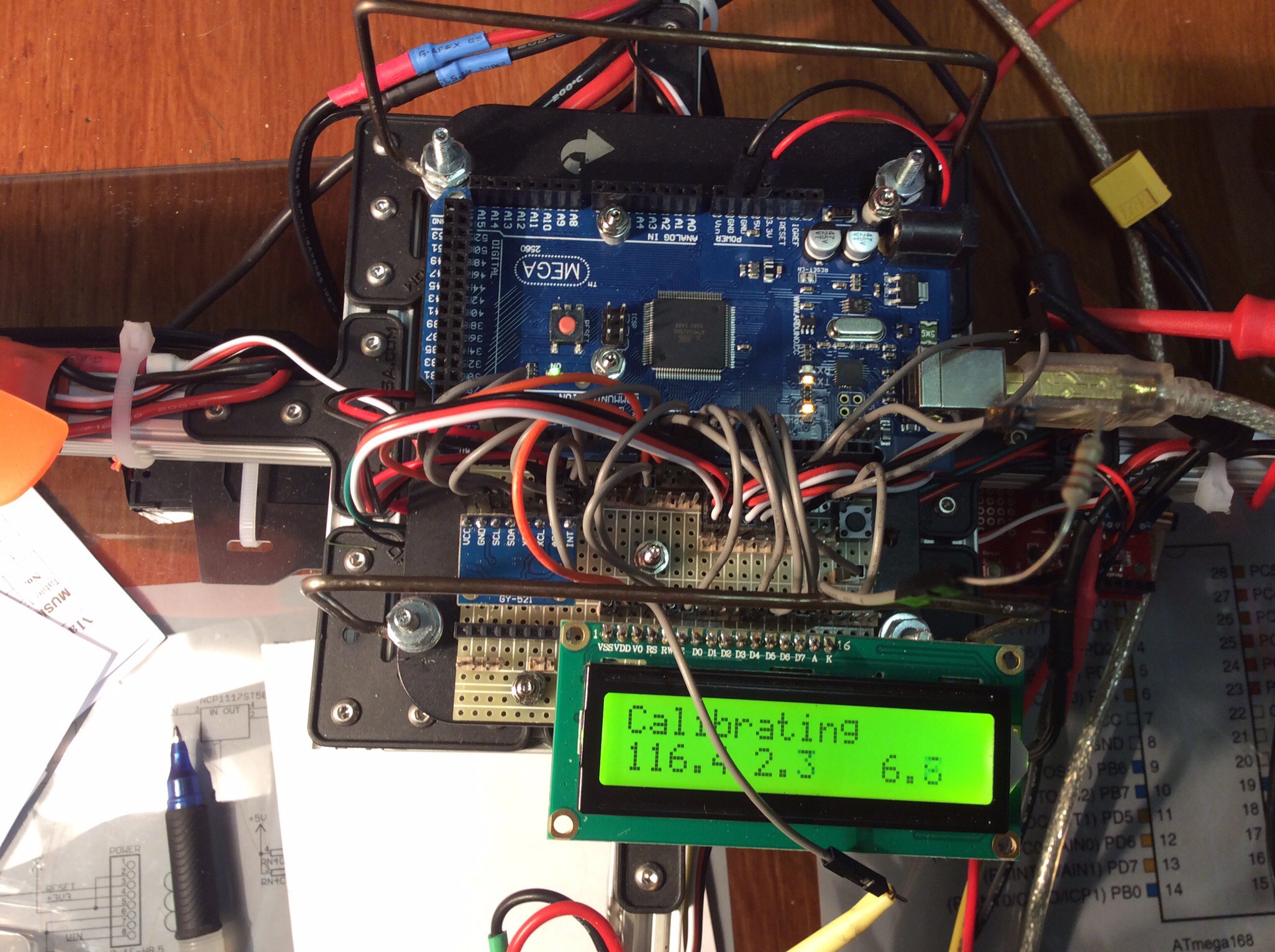
A fairly beefy quadcopter based on the arduino mega 2560, xbeam.
 KJoh
KJohBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Edwin Meijne
Edwin Meijne
 PixJuan
PixJuan
 Beko Pharm
Beko Pharm
 Cees Meijer
Cees Meijer
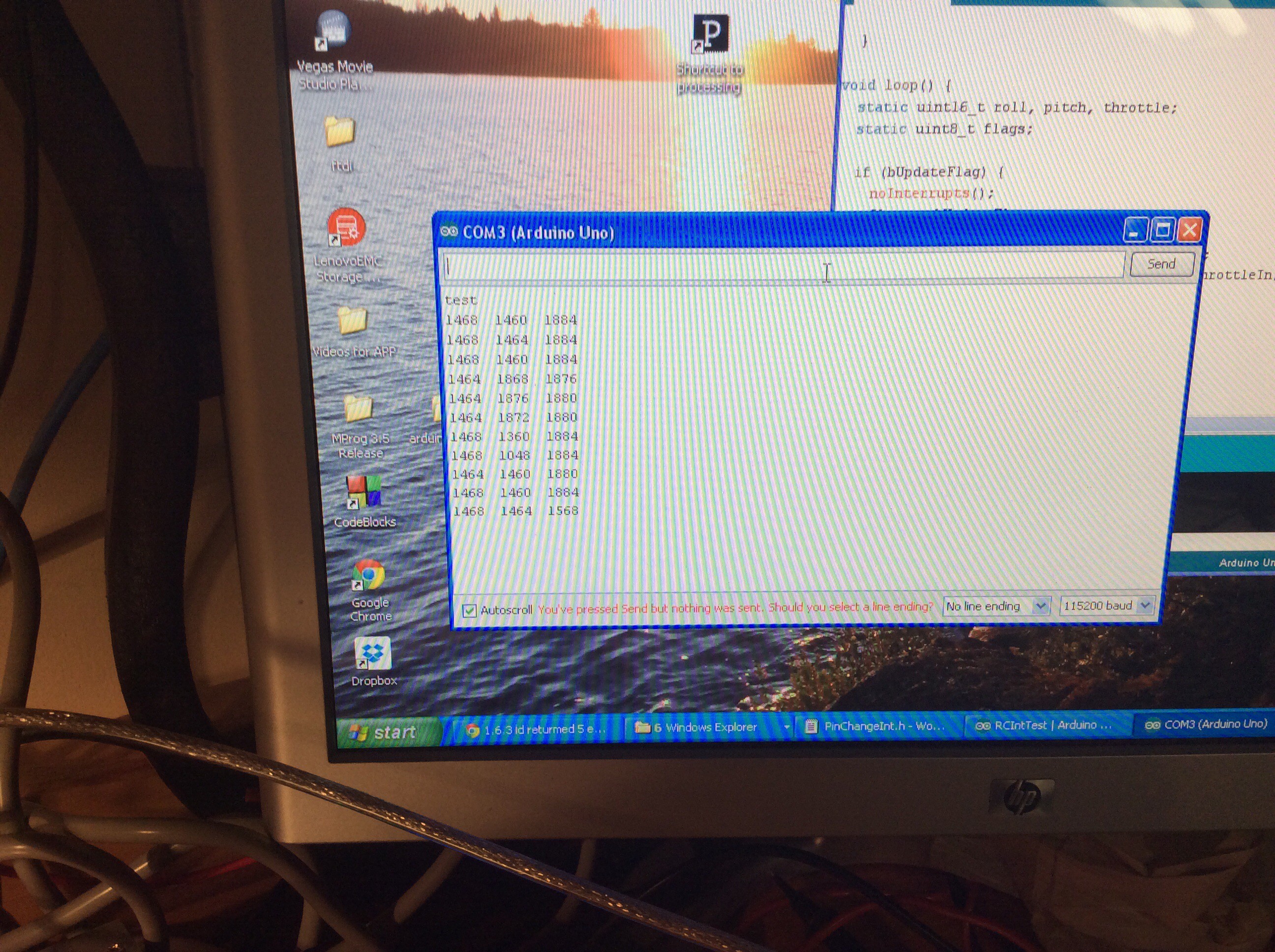
Always need more UAV projects. Are you writing your own flight controller firmware for the Mega?