 AmarOk
AmarOkAll details are in the log :)
0%
0%
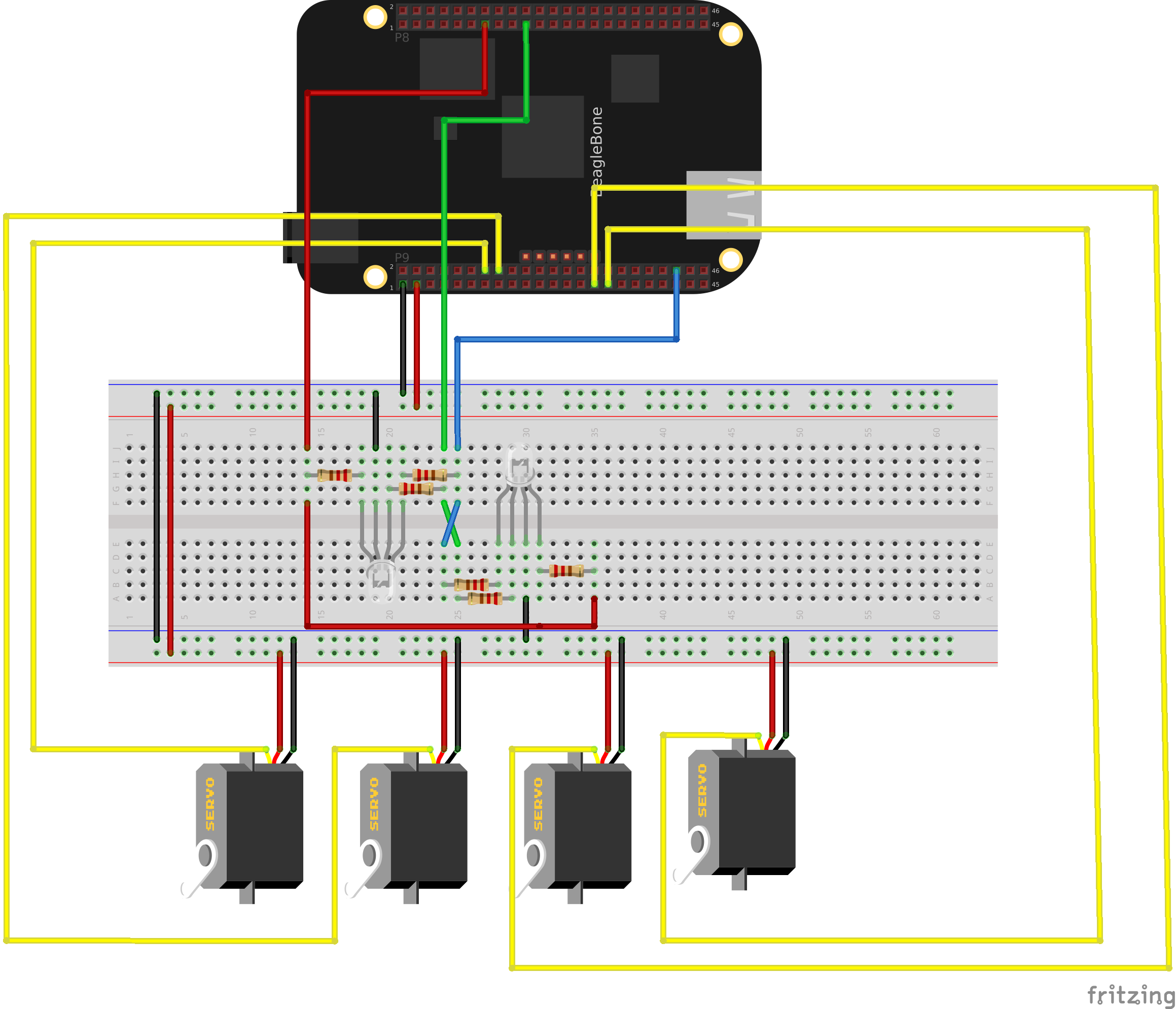
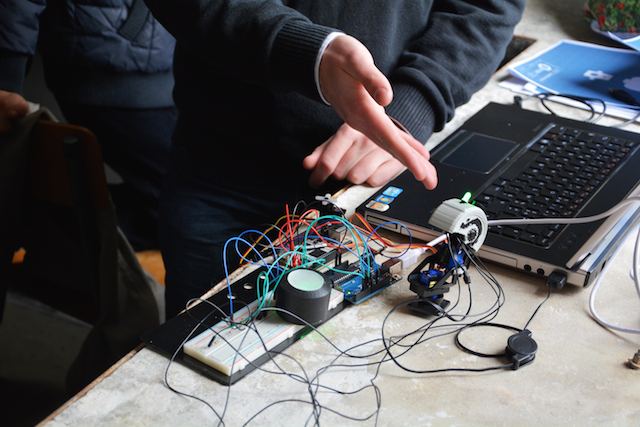
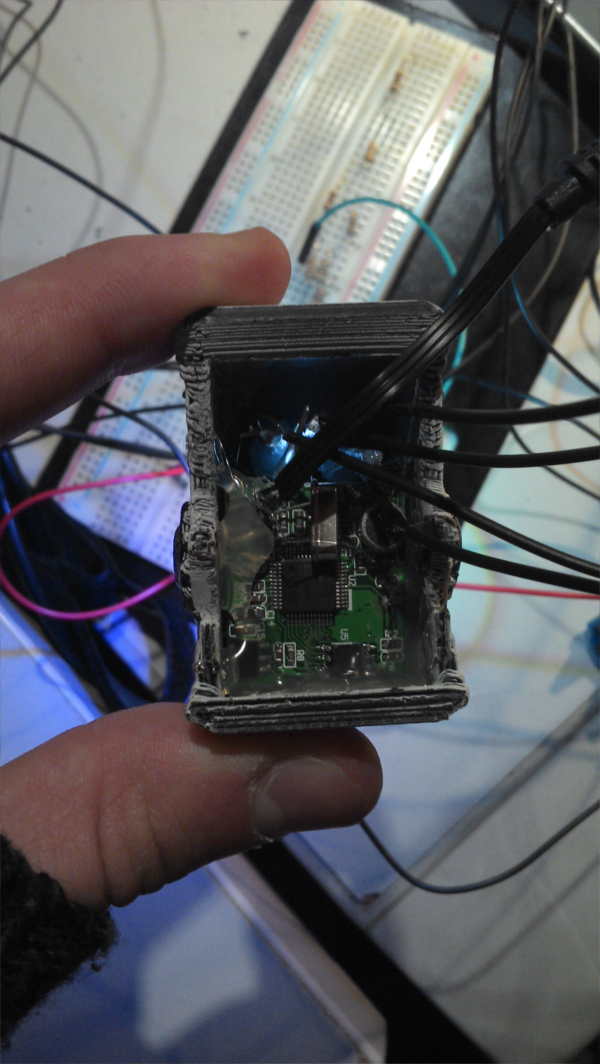
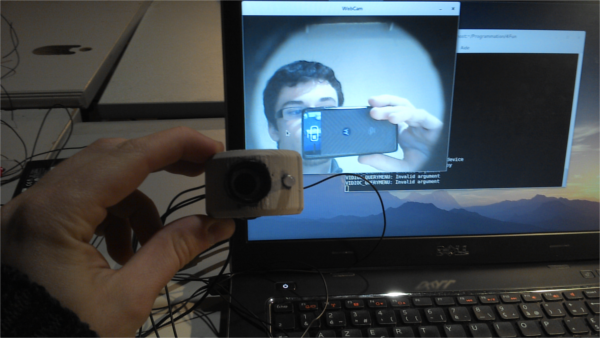
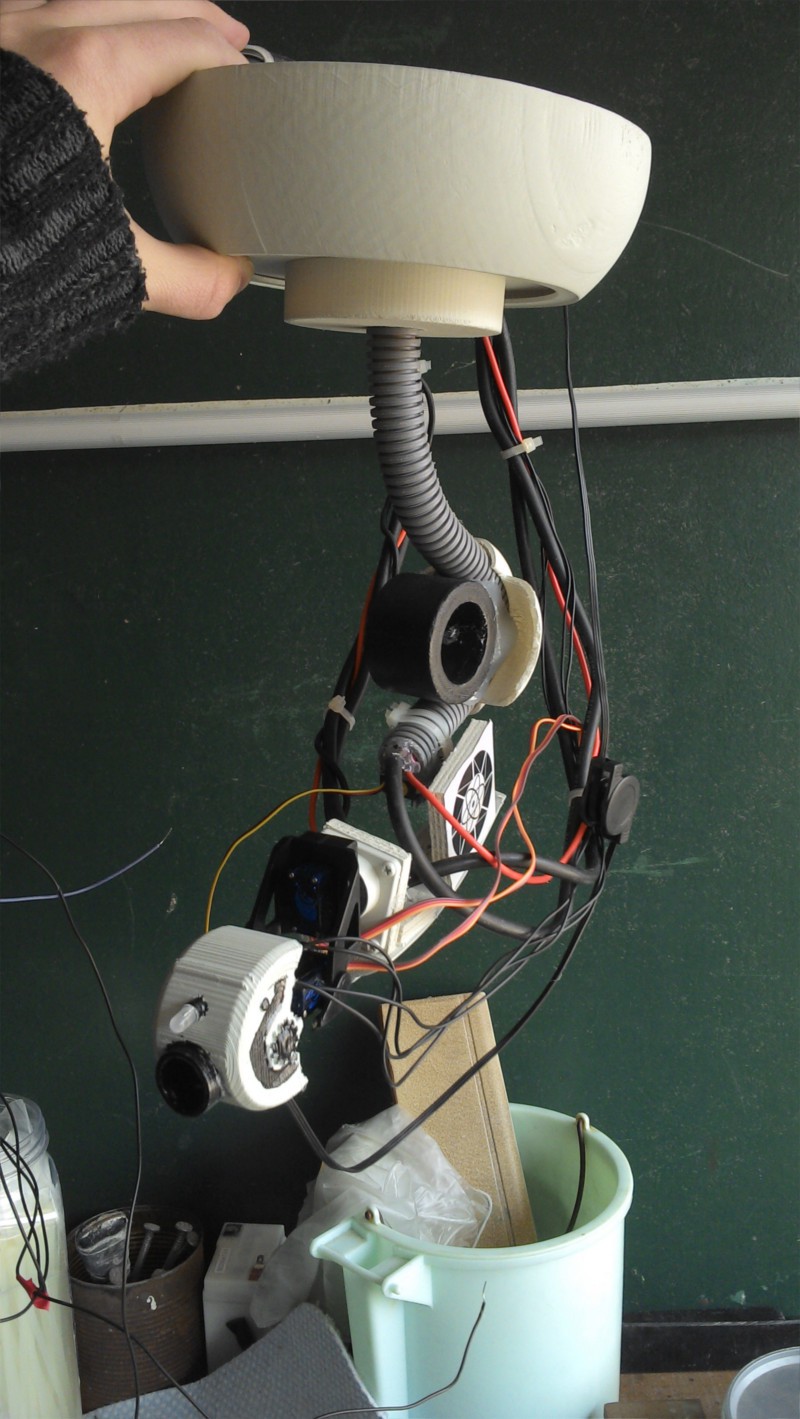
GLaDOs Replica for RORI
A robot for a personnal assistant : RORI
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests










































 Myrijam
Myrijam
 Marius Slavescu
Marius Slavescu
 frankstripod
frankstripod
On a somewhat unrelated note..... I was thinking about the voice, and how to get the text to speech engine to sound like GlaDOs. Have you thought about setting up J.A.C.K. with the output of your text to speech engine running through a DAW before going to the speakers?
Also with J.A.C.K. running you could take the incoming sound from your mic and run it though audio analysis. Maybe start making RORI understand inflection, tone, and cadence. IDK just a thought for the future.