 Hinal Shah
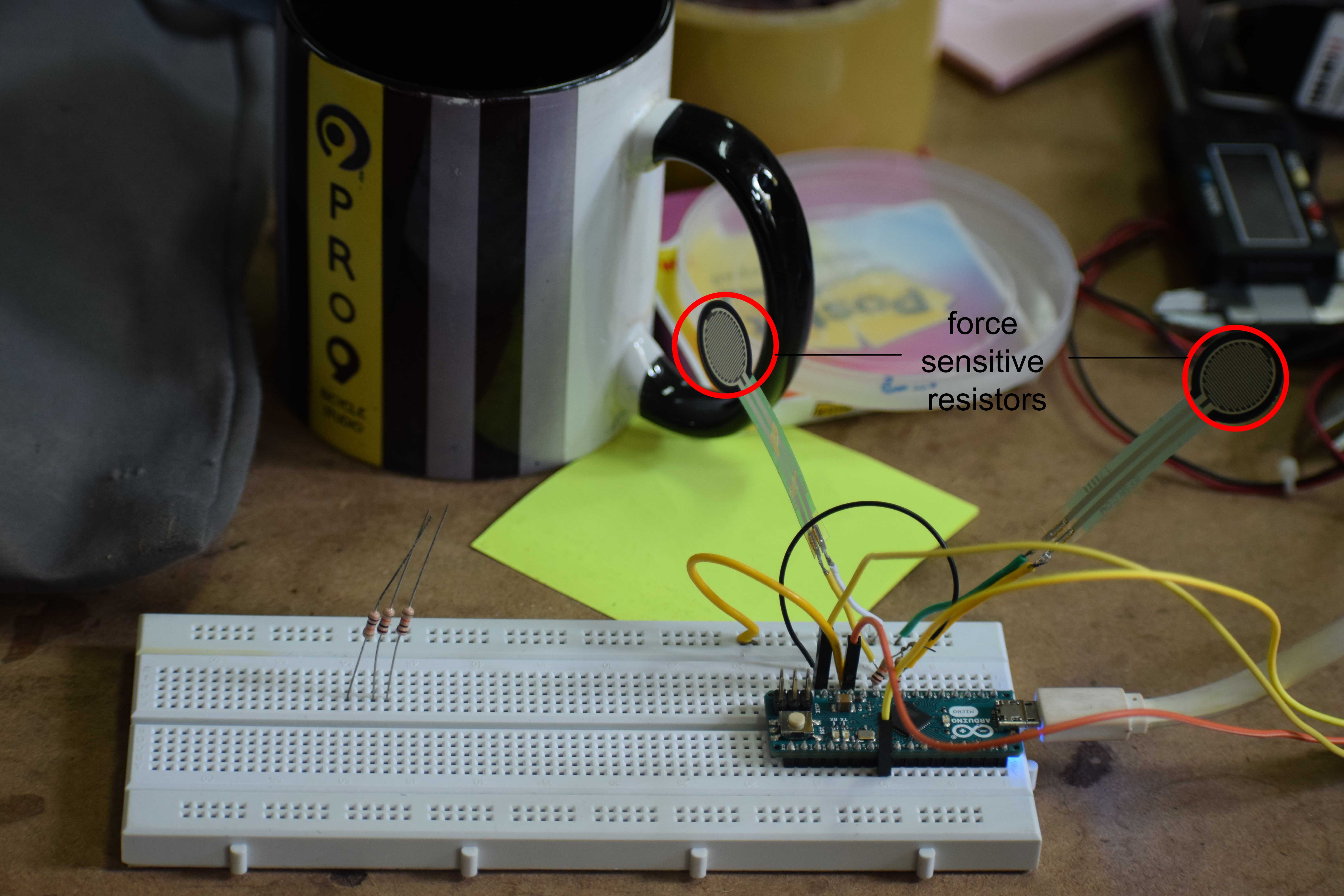
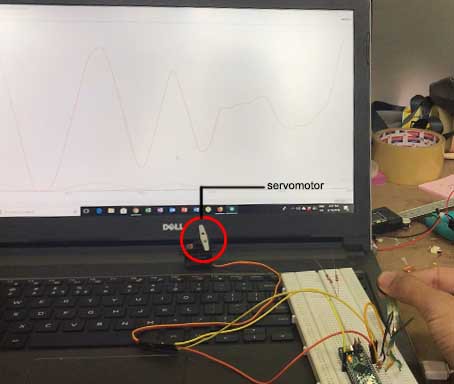
Hinal ShahPost R&D performed yesterday, today we have integrated two FSRs on the feedback system, one will be used on the thumb and the other on the palm. This simulated the force measured while pinching and grabbing respectively. The force that is measured is converted to a servomotor motion which is used as a feedback for the person which indicates the firmness of the grip. The two red rings encircle the two force sensitive resistors respectively.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.