 Austin Marandos
Austin Marandos
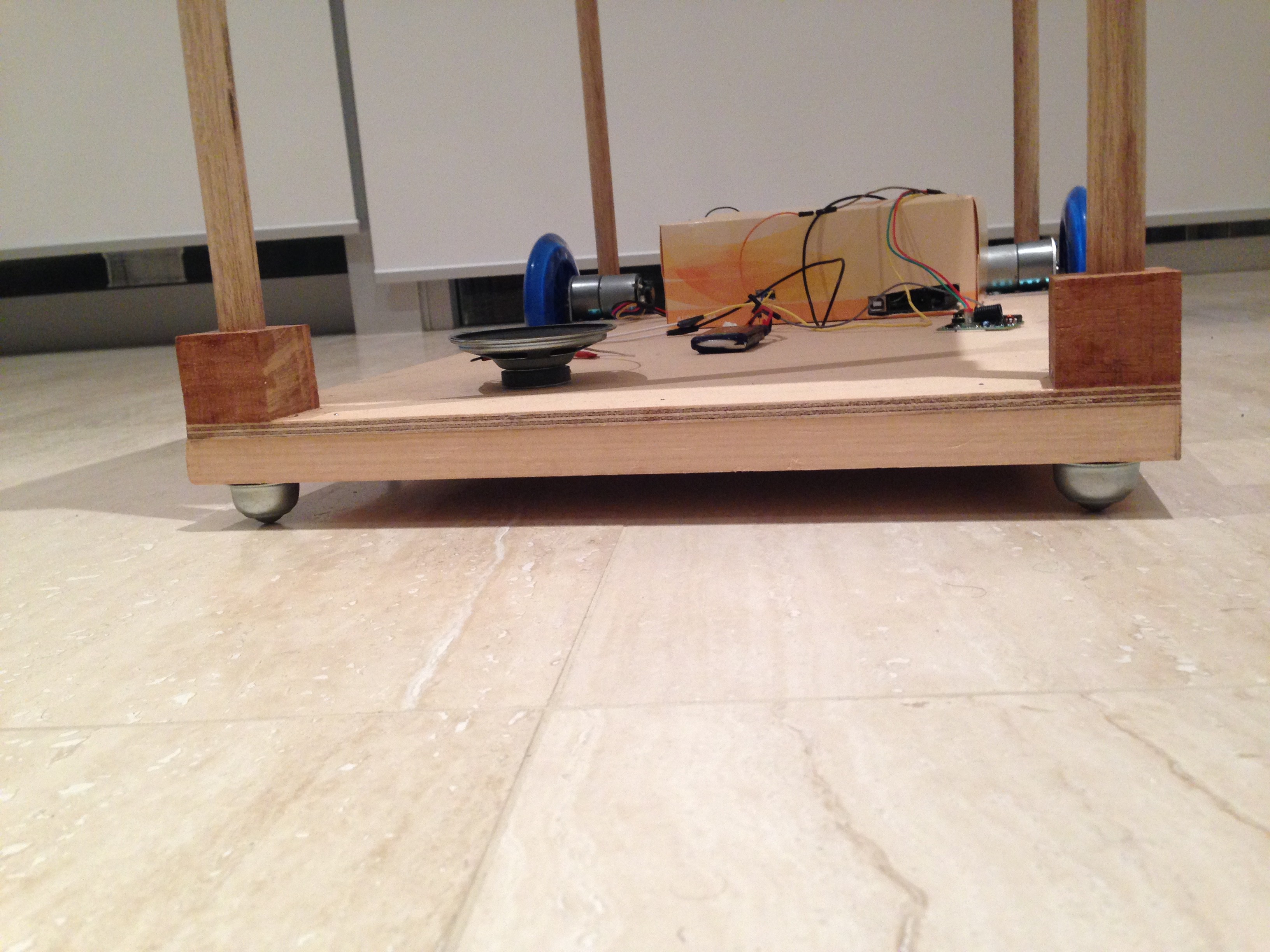
Sorry for the long wait, school and other commitments have filled my time up and I had no time to work on Jeremy, but Jeremy is back! His drive system was recently installed and tested, the wheels work great and the torque from the motors are just right. One little problem is that Jeremy's left and right turns are a little too wide for my liking, but besides that he drives fantastically. Jeremy is also fitted with two roller balls on his front end allowing him to pivot on the spot. The next step is to automate his movements and install his sensory components.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.