 Mike Rigsby
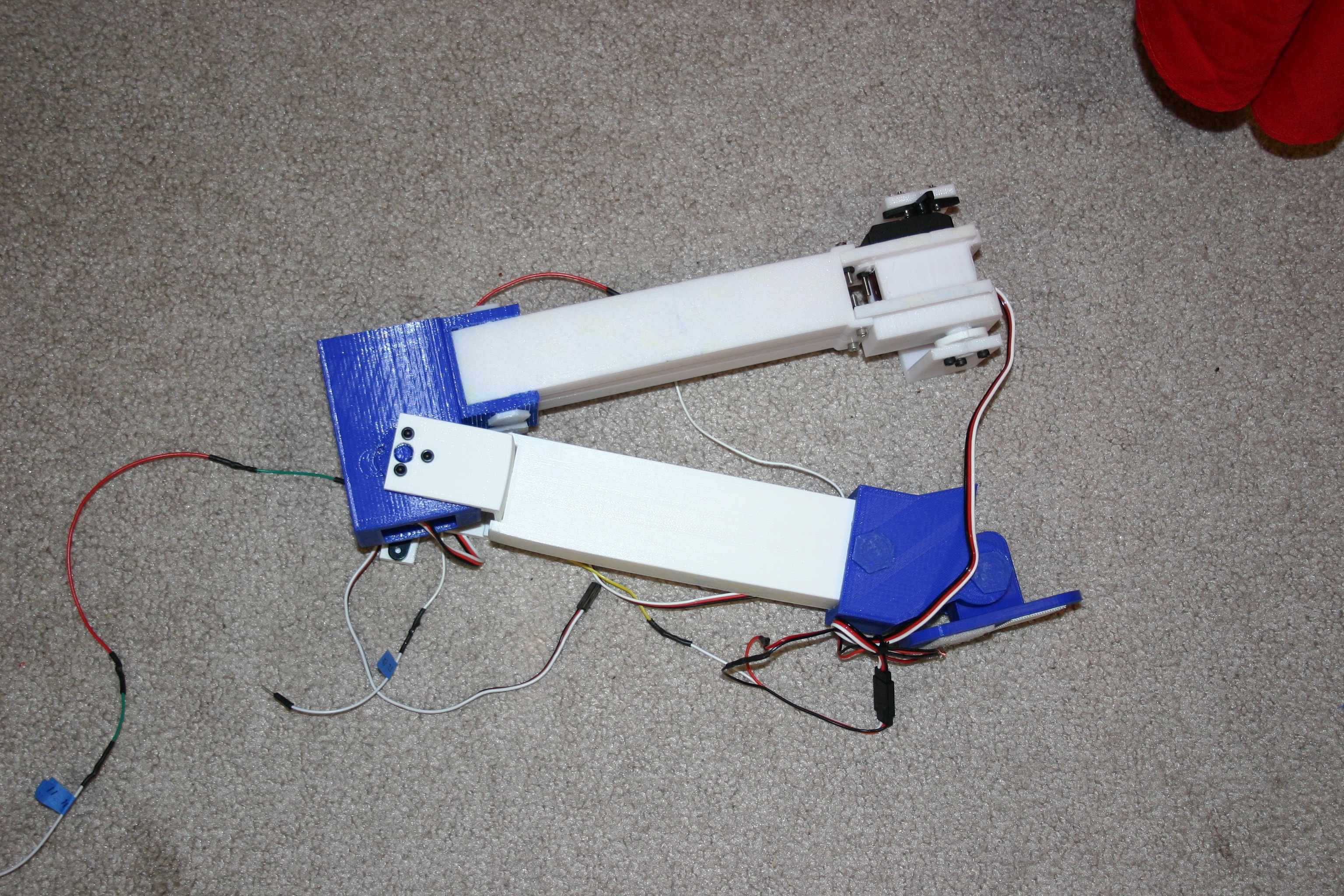
Mike RigsbyI've completed the addition of two larger, more powerful motors (twice the torque of the original servo motors). The files for the changed parts are available on this site.
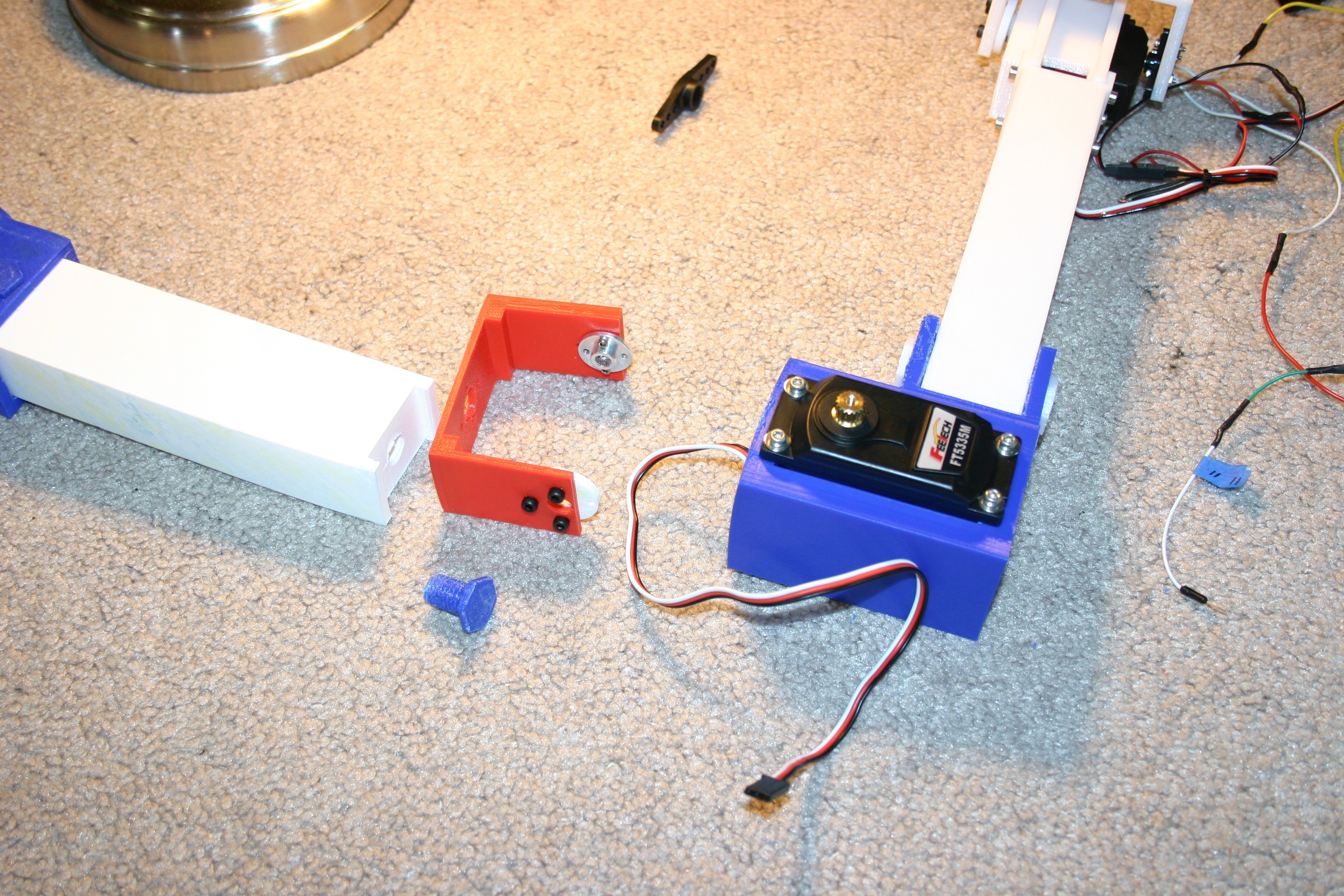
First, I added the aluminum servo horn to the new shoulder axle.

Next, I disconnected the existing elbow joint.

Now, I set the new motor and bracket in a similar position to the old--so I wouldn't mix things up too much.
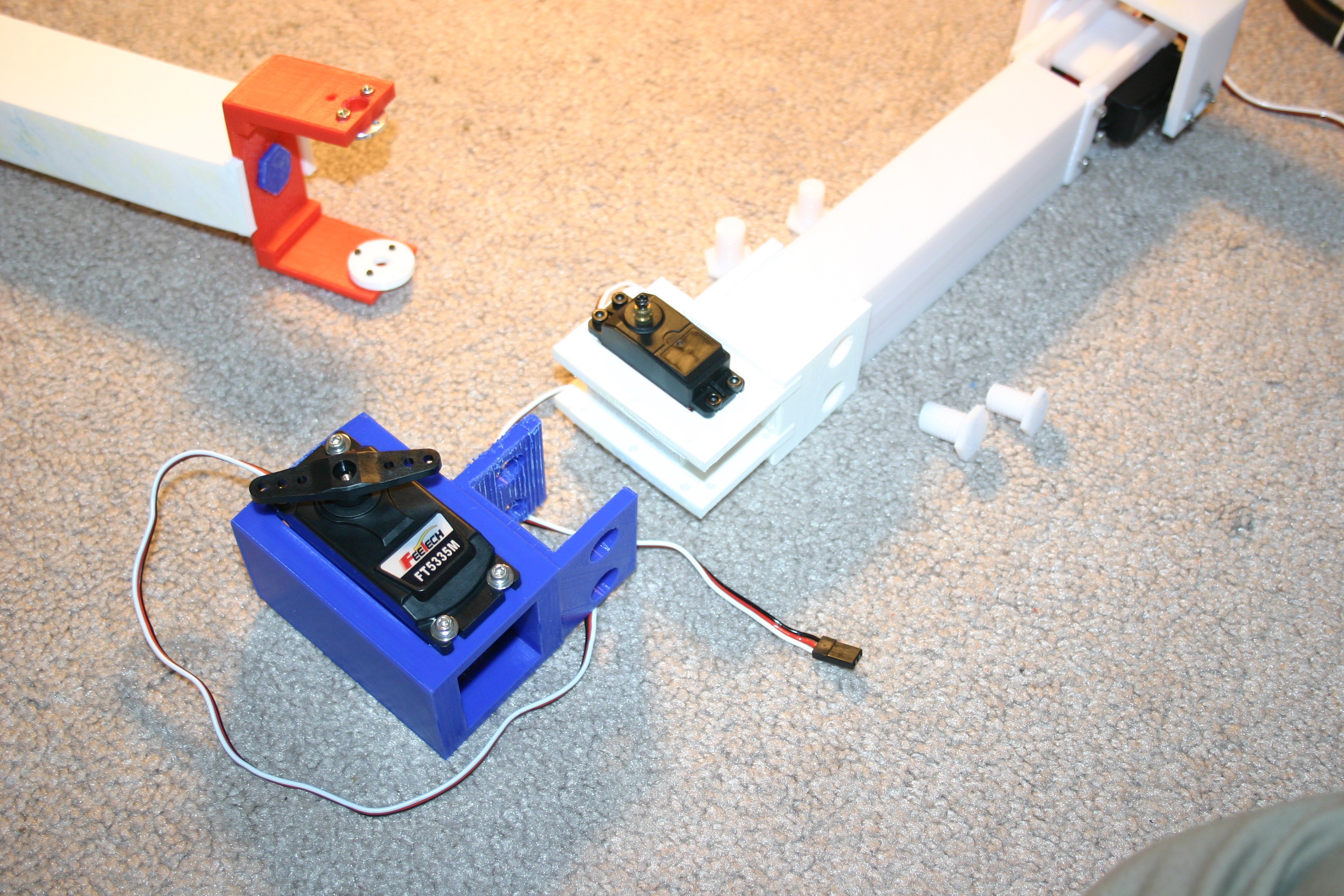
I mounted the motor to the upper leg.
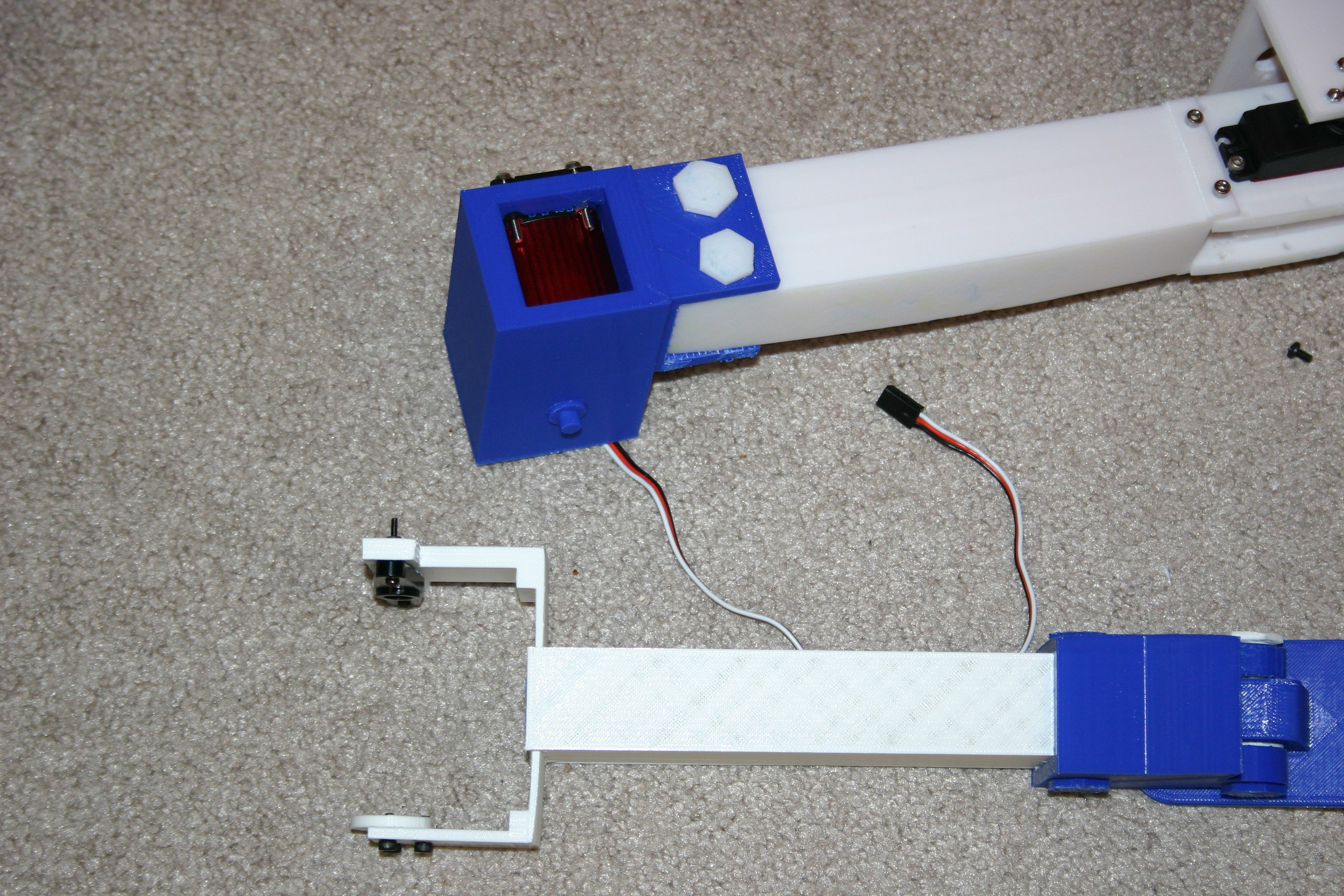
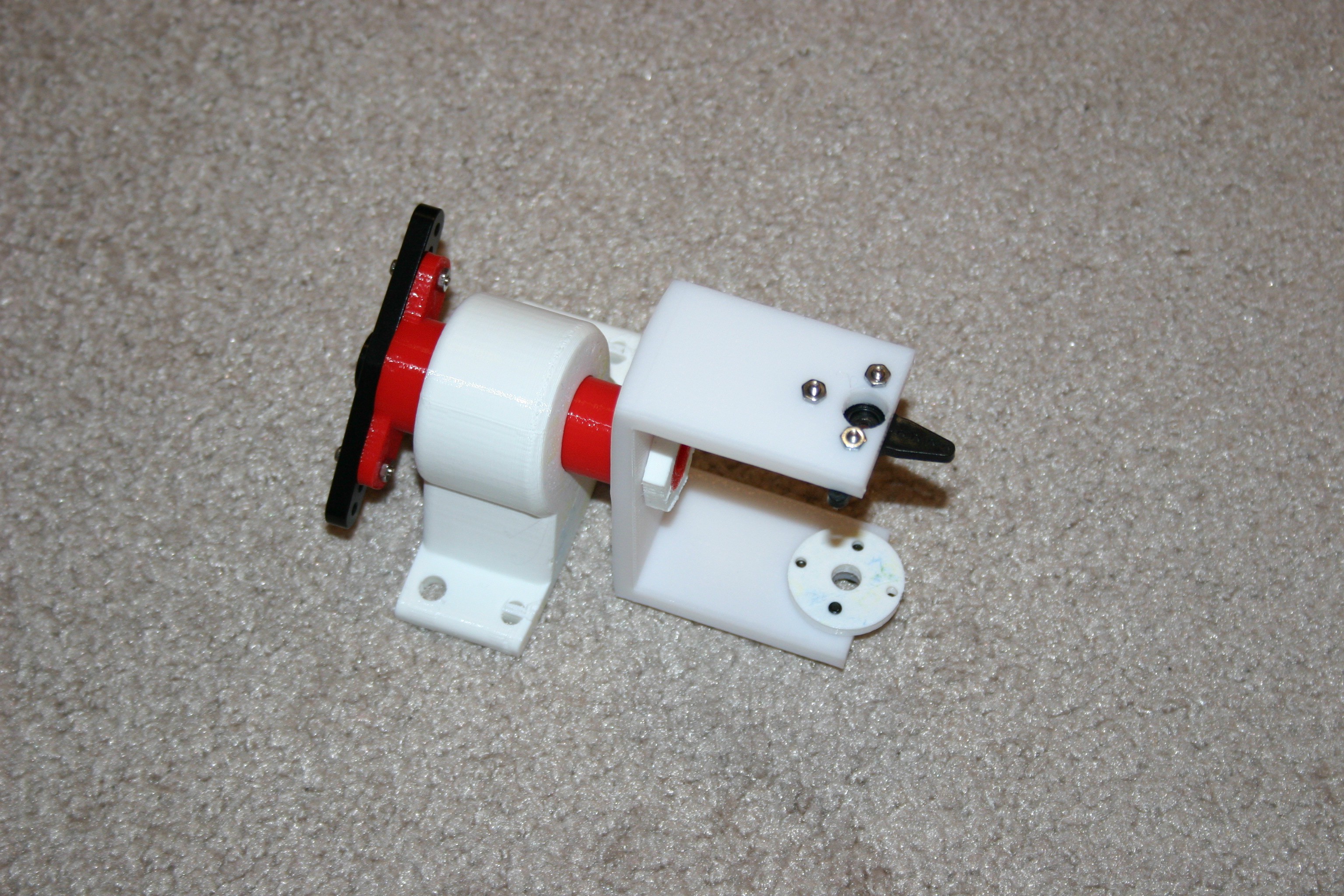
I attached the aluminum servo horn and back bearing to the ankle servo connector.

I attached this assembly to the lower leg.
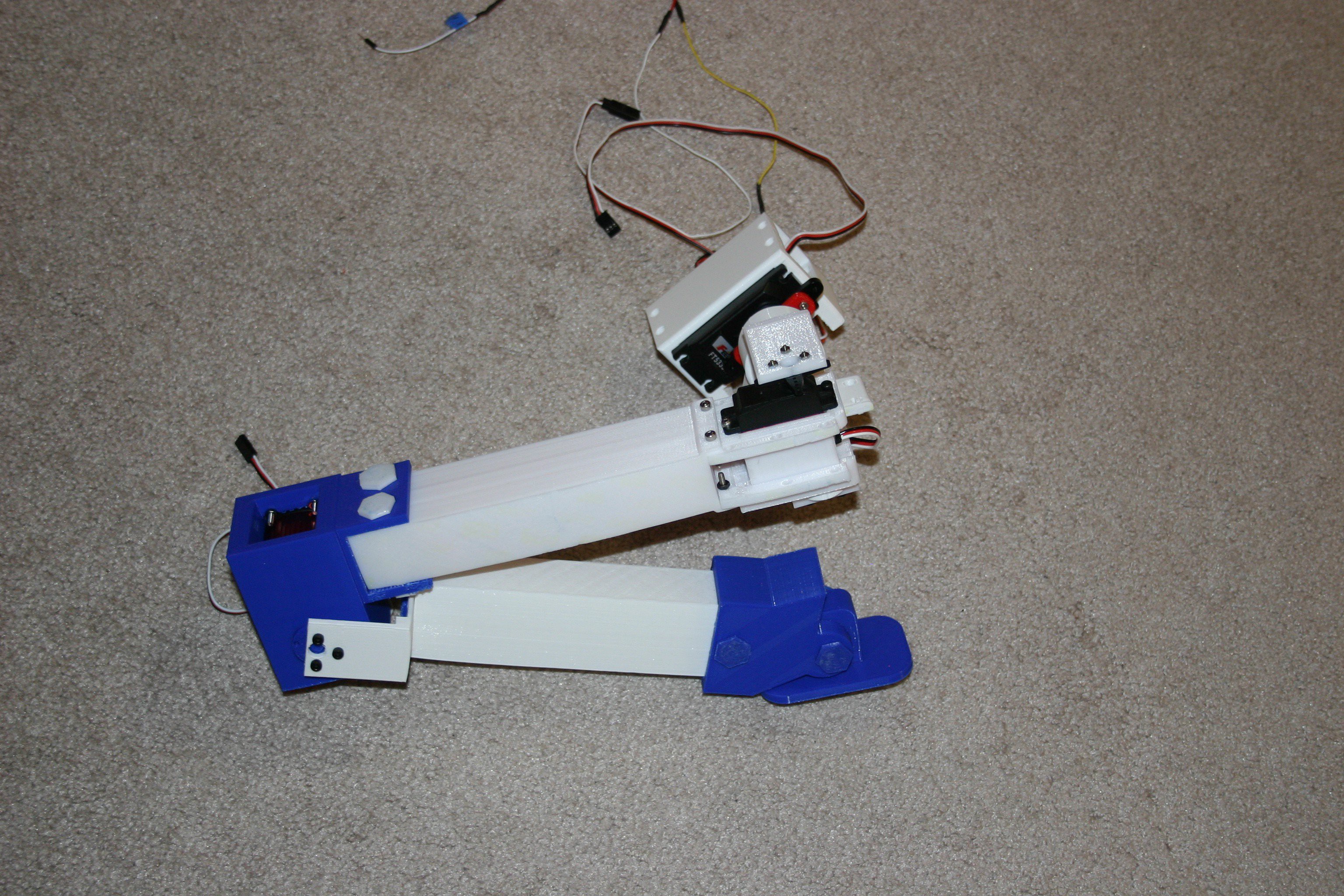
I attached the lower leg to the elbow assembly.
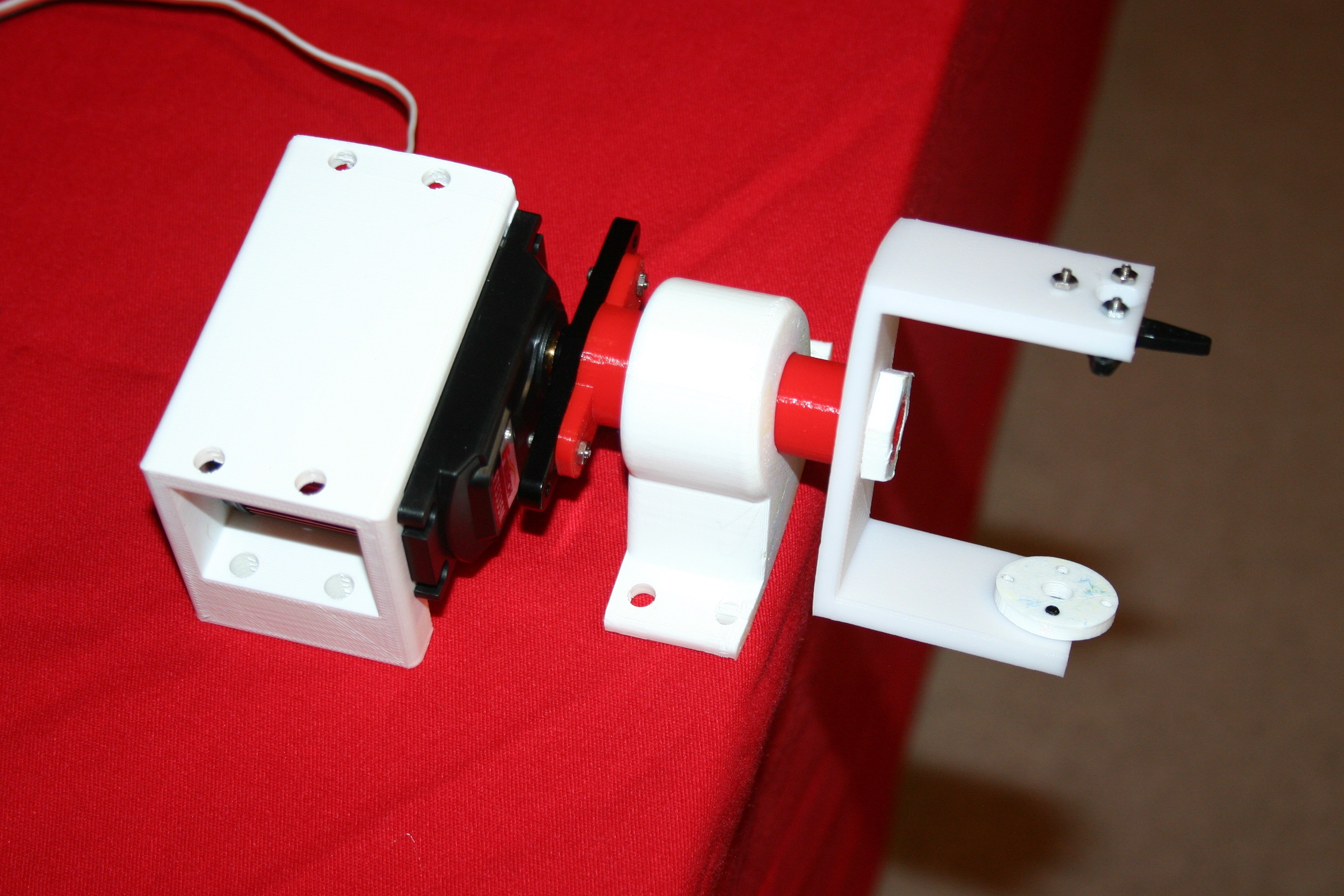
I pushed the shoulder axle through the linear bearing and attached it to the upper leg motor bracket.
I attached the servo horn to the servo motor and tightened the locking screw through the hole in the axle/shaft.
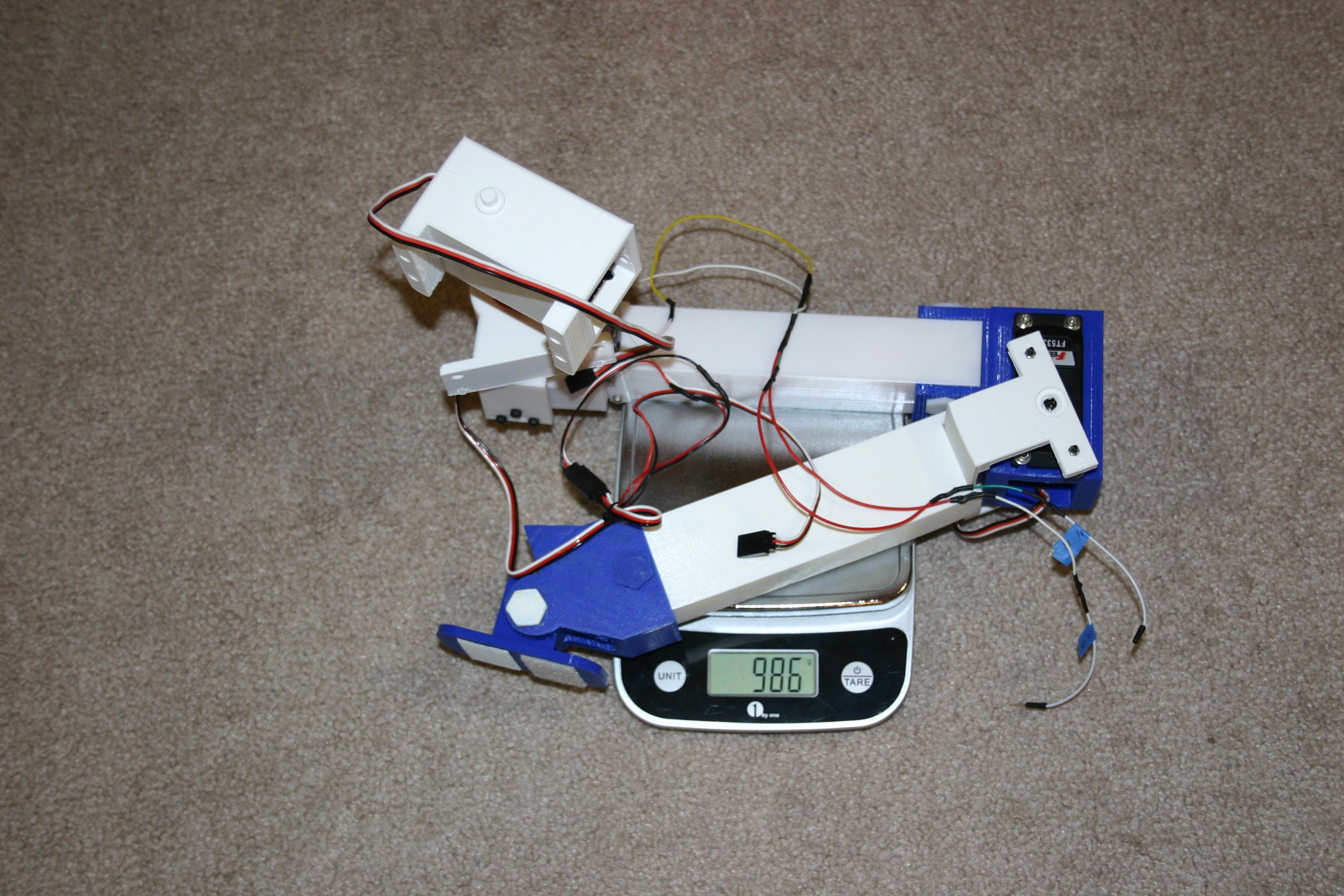
I checked the total leg mass and it came in at 986 grams--which is 86 grams more than the original.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.