 steven.sagerian
steven.sagerianThe hardware provides the
- motor drivers (using TI 8825 ICs, two)
- connections to the motors, (separate RA and DEC stepper motors) 4 conductor Phoenix connectors
- Bluetooth communications (Microchip RN42 serial module),
- connections to the motor power supply (12-50 VDC)
- over current protection (Blade style automotive fuse)
- HAL effect sensor connector for periodic error correction detection (3 pin connector)
- limit switch input connection.
The software utilized by the hardware was developed by HD (the real hero of this project)
HD has written several software which are utilized.
- The Arduino MEGA 2560 runs the OnStep Software Git hub repository for the MEGA 2560 (written by HD a very talented individual )
- An ASCOM driver to make the mount compatible with any ASCOM supported software package (ASCOM page) and here is the driver HD's ASCOM driver page (including some great documentation)
- An android application for wireless control of the mount.
The controller can be controlled by a number of GOTO software packages such as Stellarium, and SkySafari. OnStep can use Serial0 and Serial1 on the the Mega2560. Serial0 is tied to the USB and Serial1 is tied to the Bluetooth module. The software supports the LX200 compatible protocol.
The BOM can be found on the Github repository.



 Jan Neumann
Jan Neumann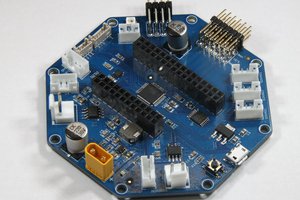
 Michele Santucci
Michele Santucci
This project is pretty old. I am thinking about refreshing it with a smd version of the latest OnStep using the newer processor board and an ESP8622. I would also target the pcb to fit a specific off the shelf housing. I recently did another design where I milled holes for the connectors on the top of the housing, that worked well.