 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠Although the steering geometry is now pretty much spot on, it does not take account of the instance where one wheel drives over a large rock, effectively travelling a greater distance. Having current sensors on the drive motors would enable final adjustments to be made to keep the motors in sync.
The sensor chosen was the LEM HO 6-P-0000:
 A PCB was designed using the suggested layout in the datasheet:
A PCB was designed using the suggested layout in the datasheet: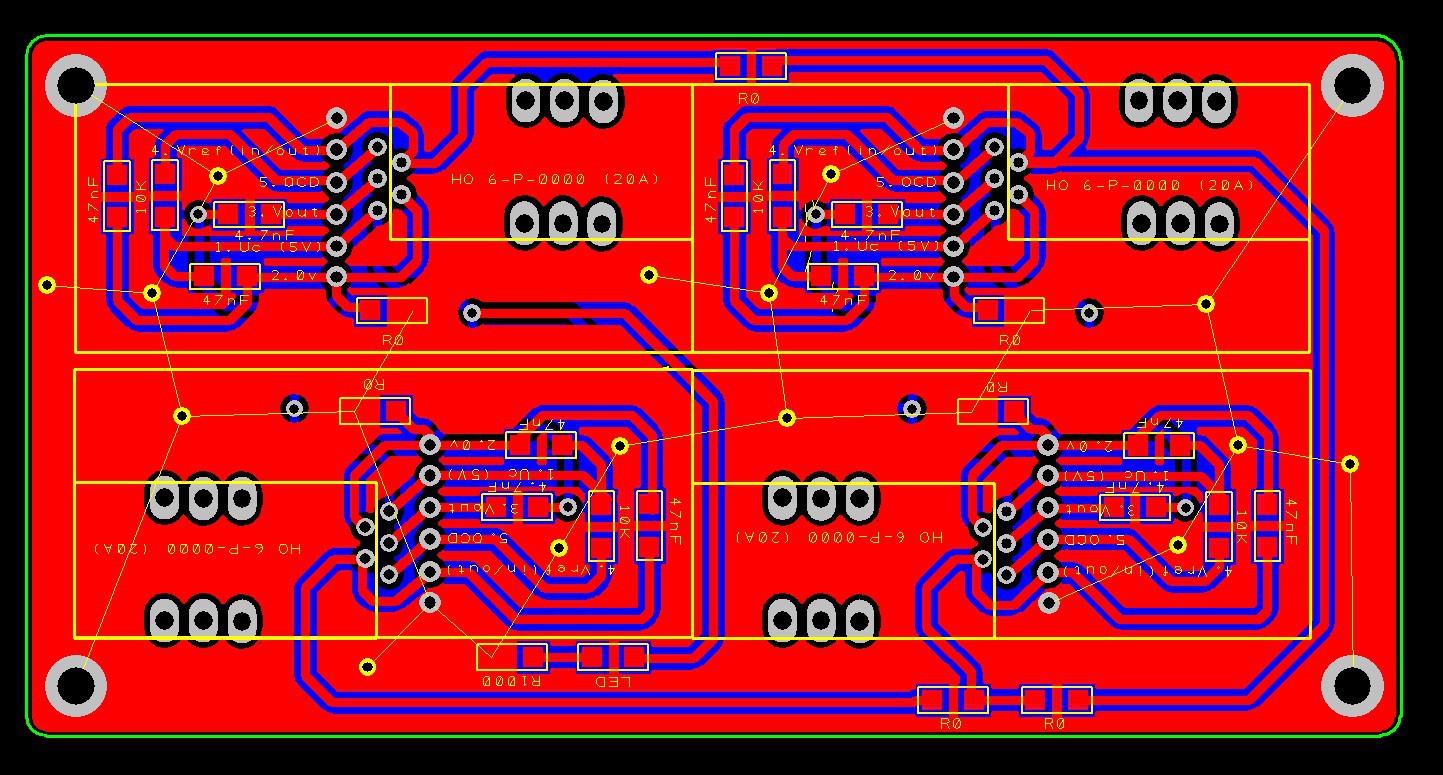
.... And ordered from JLCPCB for a total of $9 including postage.
There is a good argument for not using such sophisticated motors and drivers, but in the long run it's going to be really useful to be able to move quickly and accurately from one 'grid' of plants to the next without having to worry about positioning errors.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.