Tested the Accelerometer for usefulness, and things look good!
A basic software framework is taking shape as well.
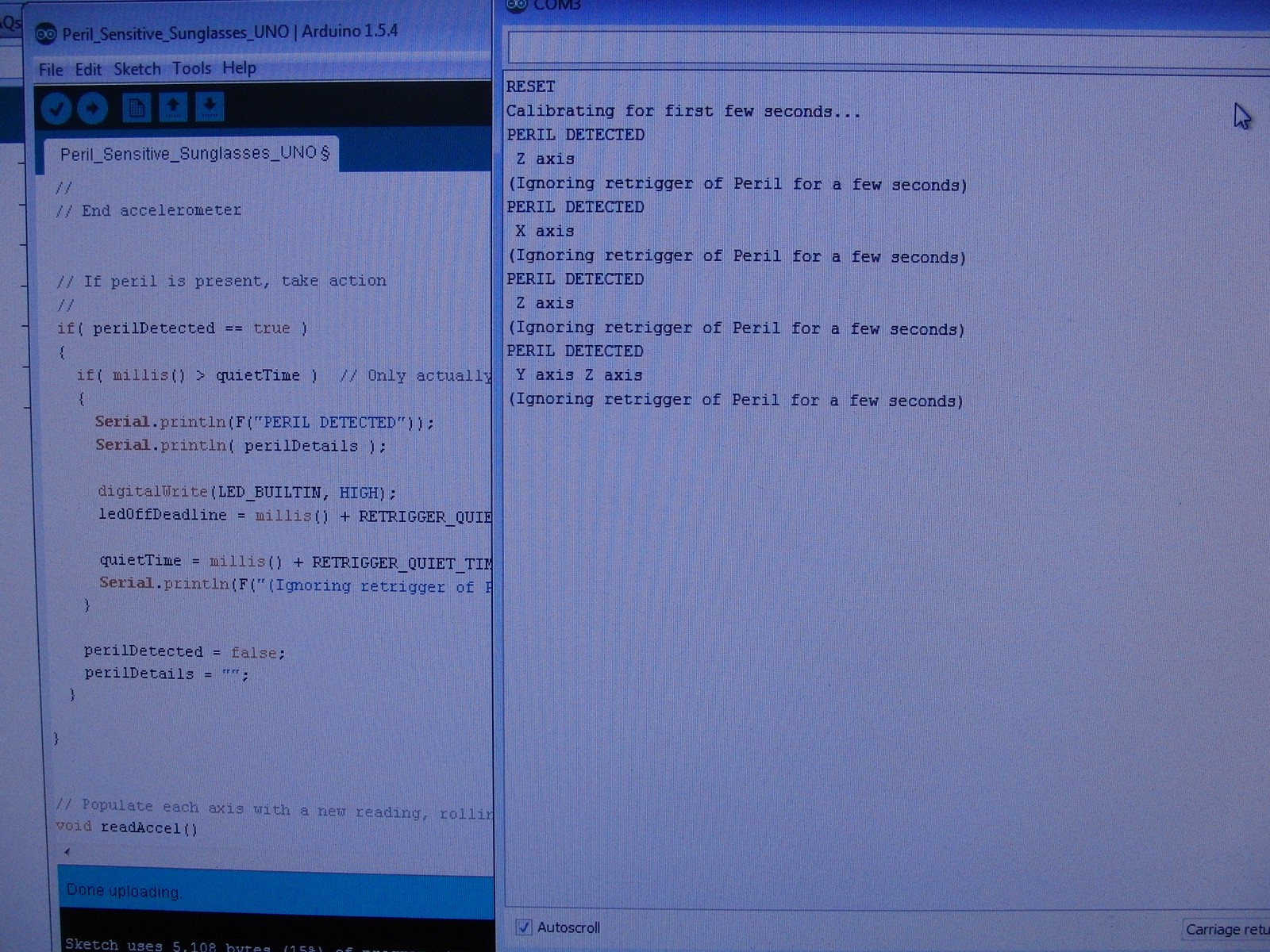
In this case, when too much movement at once (like a jerk or a jolt) in any direction is detected, the system considers that to be an indication of Peril.
The Arduino calculates a rolling average of each sensor (in this case, each of the 3 axes of the accelerometer). The rolled average is used as the basis to calculate a dynamic threshold.
When the read value of any axis exceeds that axis' rolling average value by at least 50%, that is considered to be too jerky, too sudden, or otherwise abnormal. The software then sets the Peril Detected flag.
The Accelerometer is a 3-axis analog output unit from Modern Devices which I had on hand: http://moderndevice.com/product/3-axis-accelerometer-module/. The jumper visible is a simple hardware method of adjusting the sensitivity (6g - installed, or 1.5g - not installed)
This unit also provides a digital output if 0g (freefall) is detected. This is automatically considered Perilous.
![]()
![]()
 Minimum Effective Dose
Minimum Effective Dose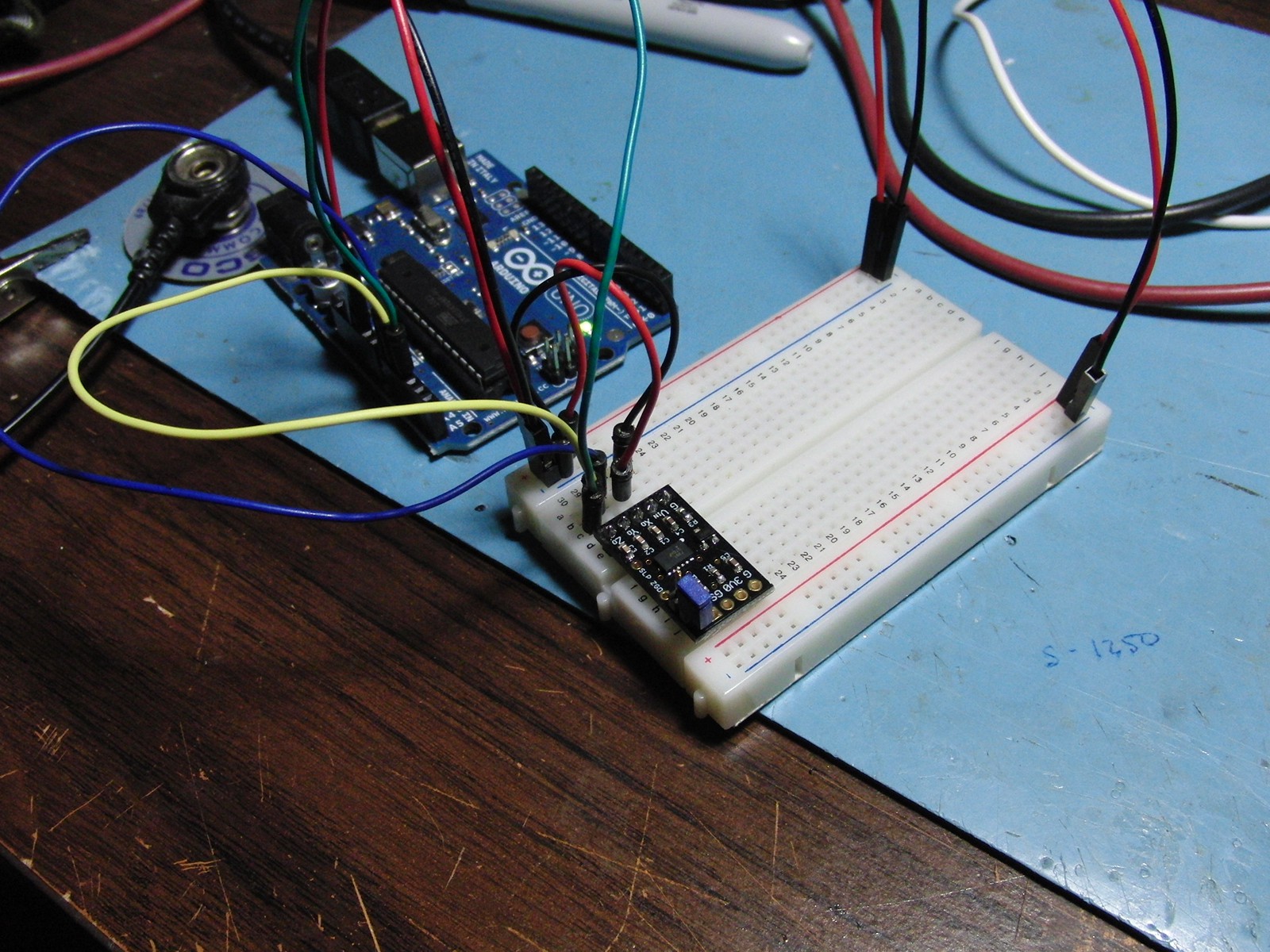
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.