 Roeland54
Roeland54To have a nice and stabile control of the movement of the quadcopter. We will use PID-controllers for the different movements. There will be 4 of them to have full control over the quad. (throttle, pitch, roll, yaw)
The PID-controller calculates the error between the setpoint (wanted position) and the current position and gives a output value that we kan use to adjust the position of the quadcopter.
We found some code on the web to start with.
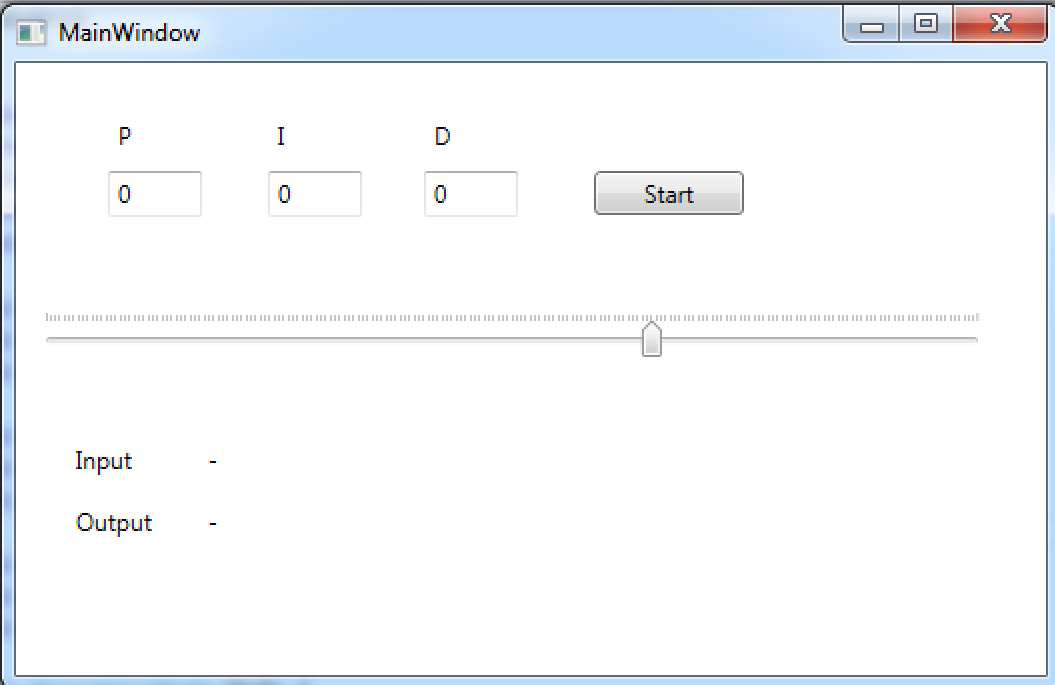
After some trail and error we managed to get the PID-controller to react to a slider in a test application.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.