Hit an issue with the "catkin_make" command on the Pi. From reading forum post, we need to enable swap file for this to complete. Ran the commands "sudo apt-get install dphys-swapfile
cd ~/linorobot_ws
catkin_make"
Catkin_make runs fine now. From the instuctions 1.4 we gave each the robot and the host development a static IP, that way every time we want to work on the robot we don't have to change the settings. We're using the kinect so we skipped section 1.5. We have wired up the section as can be seen the picture :
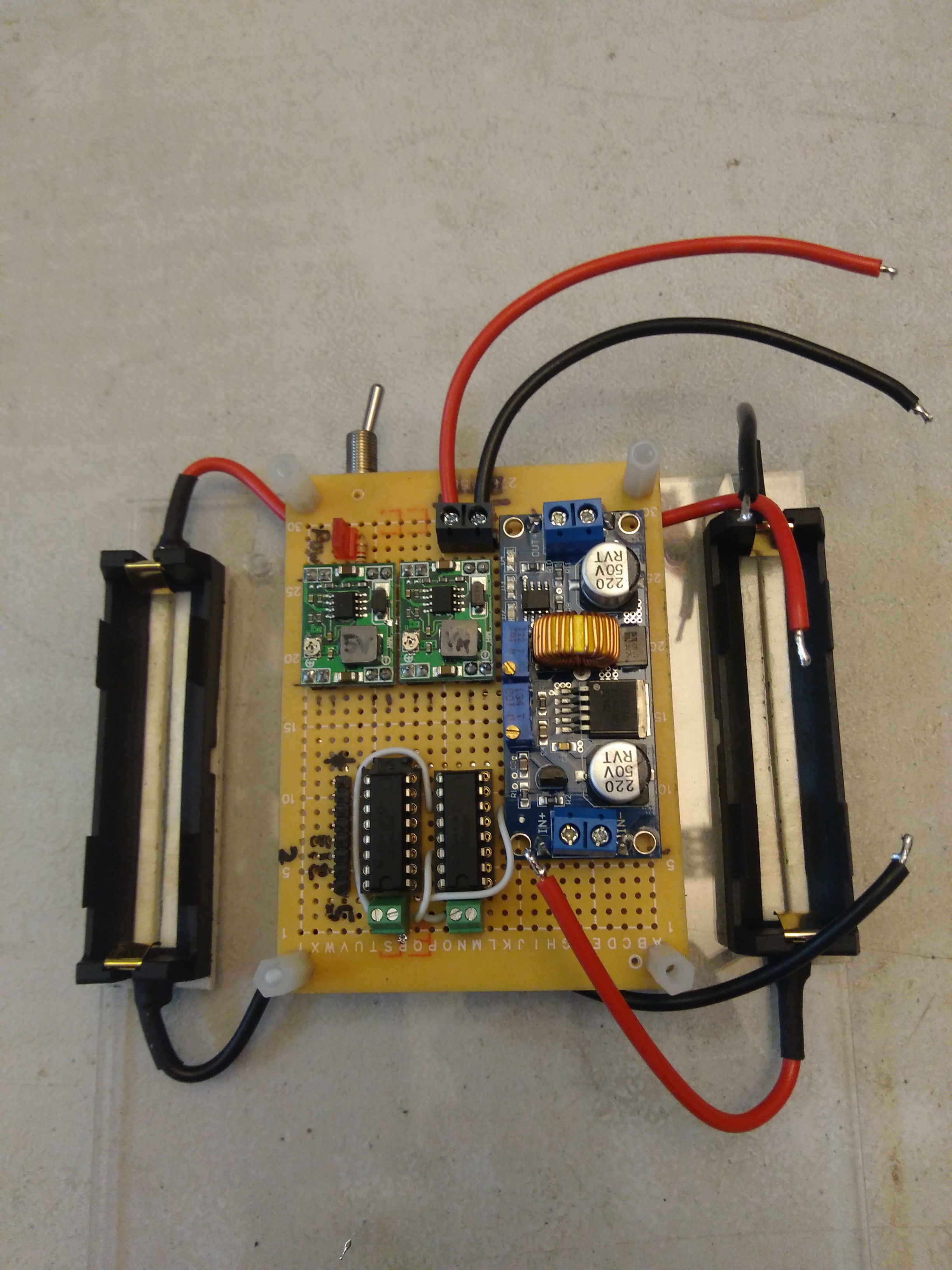
Our setup is 2 x 8650 batteries series This gives us ample of voltage for the robot. We use 2 buckles to reduce the power for the various components. The 2 chips in the center are the motor drivers and on the right hand side circuit is to charge the battery.
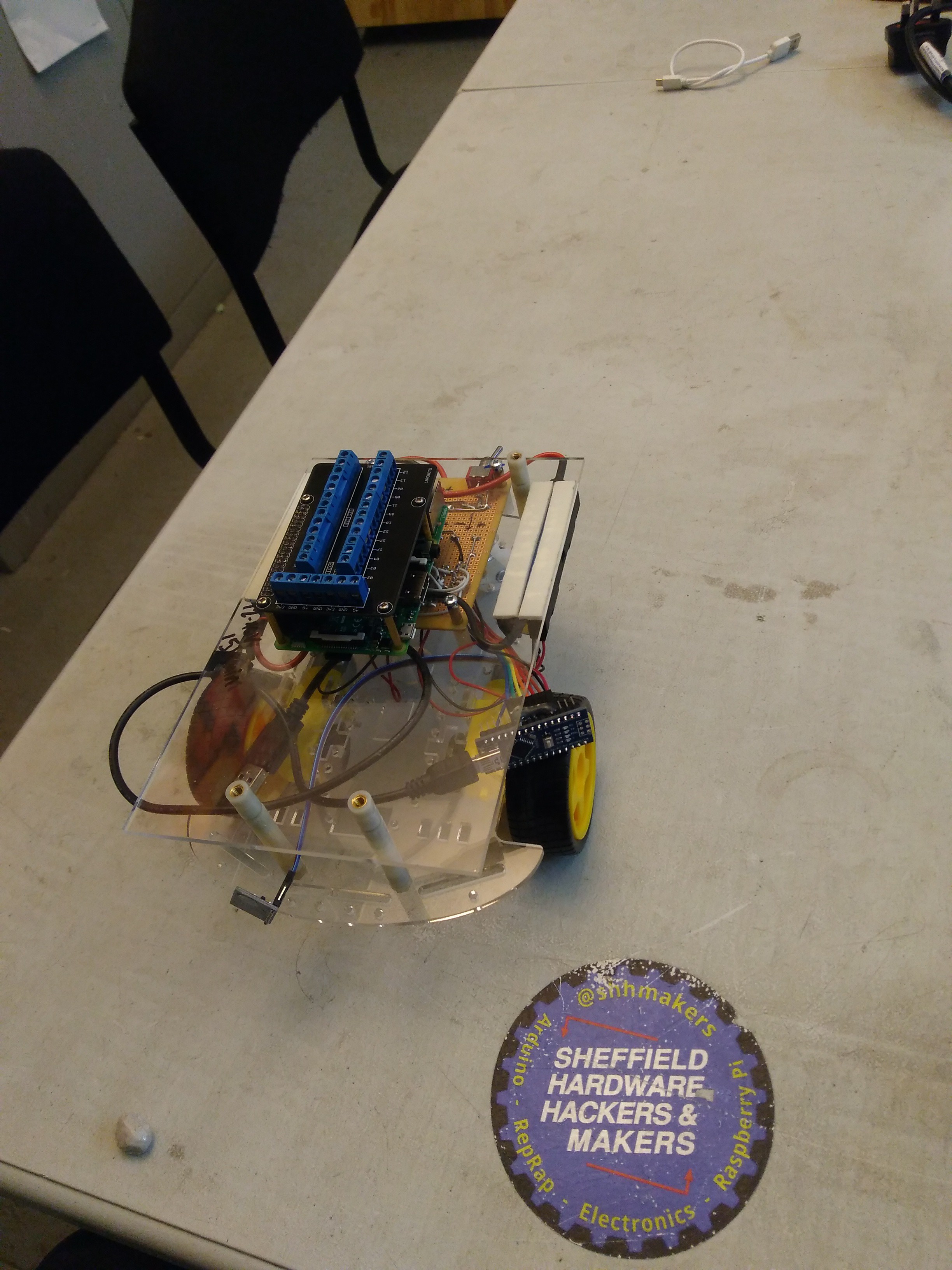
We've now attached the rest of the components: the raspberry pi (the robot computer), the Teensey.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.