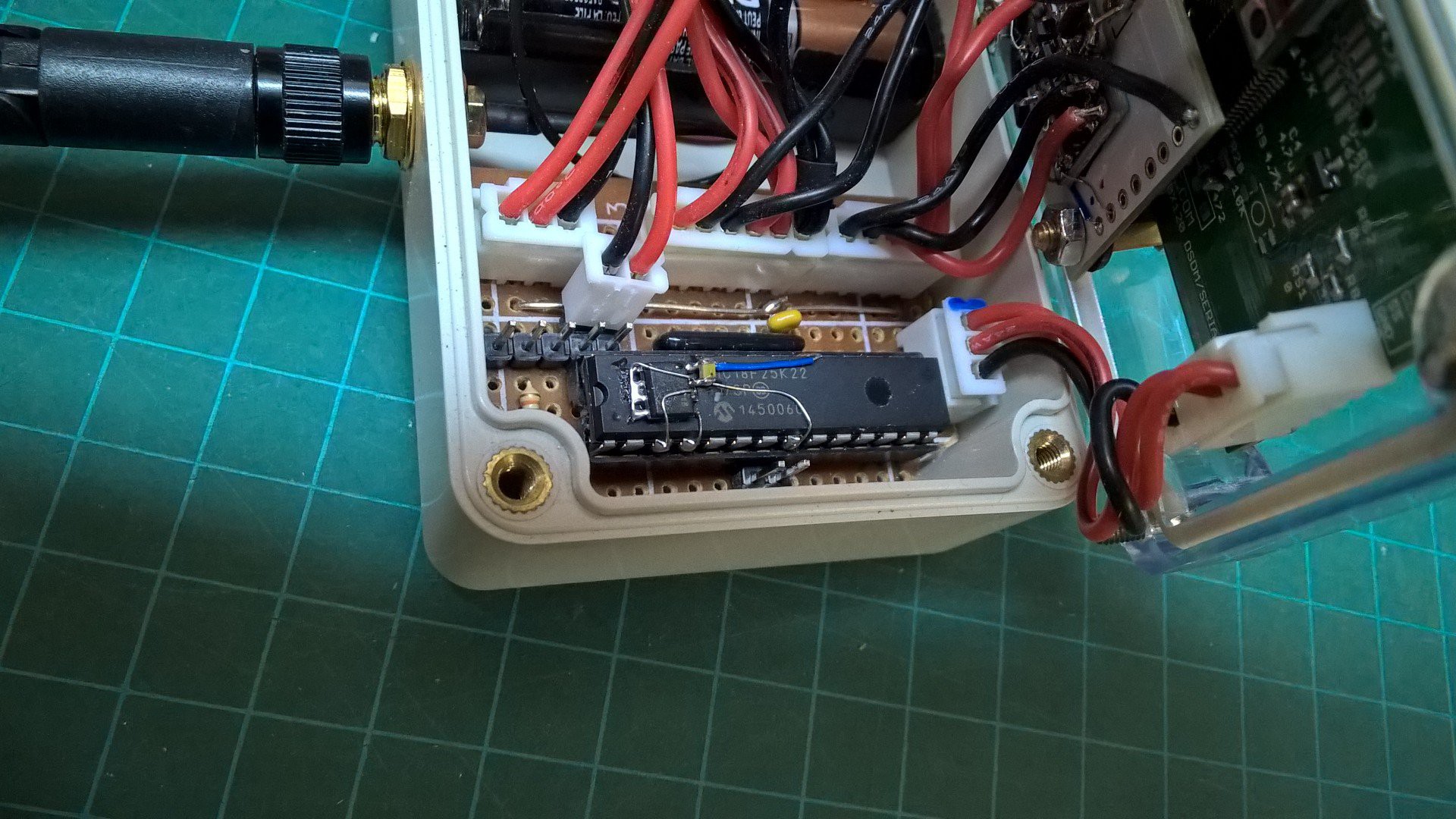
To make sure I would not void my mower's warranty I've used 2 Hall Effect sensors and a few magnets: one on the bail switch, five on a wheel. Three revolution of a rear wheel represent a distance of 245cm (~96½"). There are 10 spokes on the back of the wheel. With five magnets this gives me a resolution of 16.33cm (6.43"). The display I'm using is a Digole 160x128 True Color TFT LCD. I like Digole's displays because they have a backpack with a complete graphic engine and 7 preloaded fonts. The kit run on 2 AAA batteries. The ESP8266 is initialized on power-up to get the actual time on my Windows Home Server and placed to sleep to minimize the power consumption. When it's time to publish a hard reset is done. At the end of transmission the ESP8266 is put to sleep again.
I opened a Twitter account (@MyEGOMower) and a ThingSpeak channel for the mower. At the end of each "mowing session" I push a button and my mower publish the results on Twitter (via PushingBox ) and ThingSpeak (https://thingspeak.com/channels/38135 ). A recipe on "If This Then That" (https://ifttt.com) watch the Twitter account and post a message on my personal Facebook page with the Tweet just to annoy my friends!




 Darian Johnson
Darian Johnson
 Maso
Maso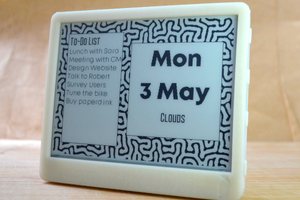
 Rohit Gujarathi
Rohit Gujarathi
 strange.rand
strange.rand
Nice idea, Michael. Do you have a detailed description of this project? I wonder why do you need a PIC18F25K22 chip if you already have a ESP8266 on board?