 Martin Vincent Bloedorn
Martin Vincent BloedornAs I progress in the making of the biohand, I'm starting to note all things I believe have to be changed or improved. And the list is starting to get quite long:
- I'm not exactly satisfied with the potentiometers in the fingers; I'll redo the cabling and their attachment to the phalanges.
- The palm is (very clearly) incomplete, but I'll redesign it completely. The control board, currently located in the inner palm, will be moved out to the dorsal region of the palm.
- The thumb currently flexes around the Metacarpophalangeal joint; I'll move the active joint to the Carpometacarpal (in the human hand, the thumb's joint that's inside the palm).
- Software must be reestructured.
Yea. Before this, I won't consider any tests with subjects, so I'm looking at a minimum of 3-4 months range of work.
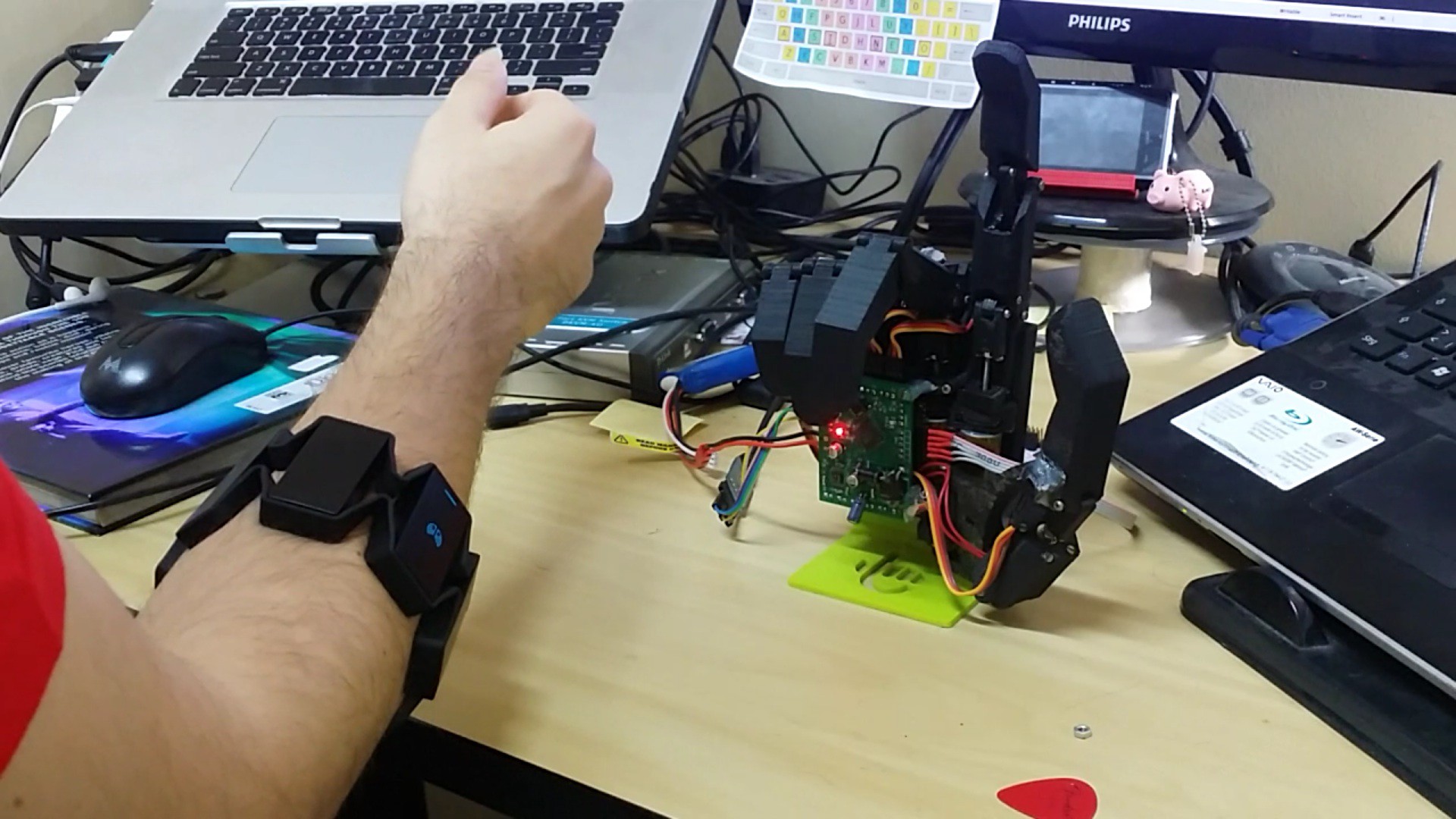
In the meantime, (just for fun) I ran some tests on the current biohand prototype. I've interfaced it with Myo Armband, a great off-the-shelf intelligent EMG sensor, using Niklas Rosenstein's python bindings. The setup requires a PC or smartphone to be connected to the Myo, as it cannot be directly connected to the biohand's ARM Cortex-M3 processor (not in any way I'm aware of).
Check the video on Instagram, or click the pic below to see it :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.