 strofo
strofoHere is the corresponding repository containing everything to make this project work:
https://github.com/strofos/grigore/tree/master/SOFTWARE - Board/Test02 - Detection using AForge Mono
After downloading it, we must compile it. Just navigate to the folder "Test02 - Detection using AForge Mono" and run the "xbuild" command:
root@raspberrypi:/grigore/Test02 - Detection using AForge Mono# xbuildIt will start compiling the hole solution, project by project:

Unfortunately I am not that familiar with Linux so I didn't set the lines to move the generated libraries.
So we have to manually move "AForge.dll", "AForge.xml", "AForge.Imaging.dll", "AForge.Imaging.xml", "AForge.Math.dll", "AForge.Math.xml" to the "GrigoreDetectionConsole\bin\Debug" folder.
Each library can be found in its project folder, inside [Project]\bin\Debug
Now we can run this test:
root@raspberrypi:/grigore/Test02 - Detection using AForge Mono/GrigoreDetectionConsole/bin/Debug# mono GrigoreDetectionConsole.exe and will get a response like this: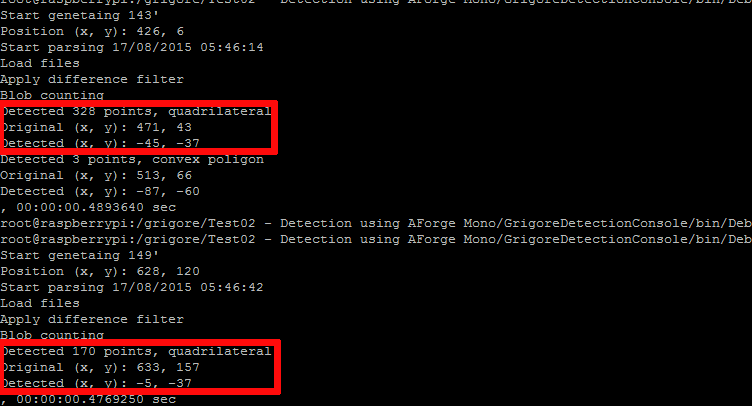
As you can see the code runs, but the detected position is not quite what it should be. I will output the difference image and edges to debug it.
I also added a Windows project that does this in real time but unfortunately I can not run the X Server in remote, so I can't use it for the moment.
The detection duration is half a second, which is great for this project.
This was still a success, so soon I'll be starting to write the main code.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.