0%
0%
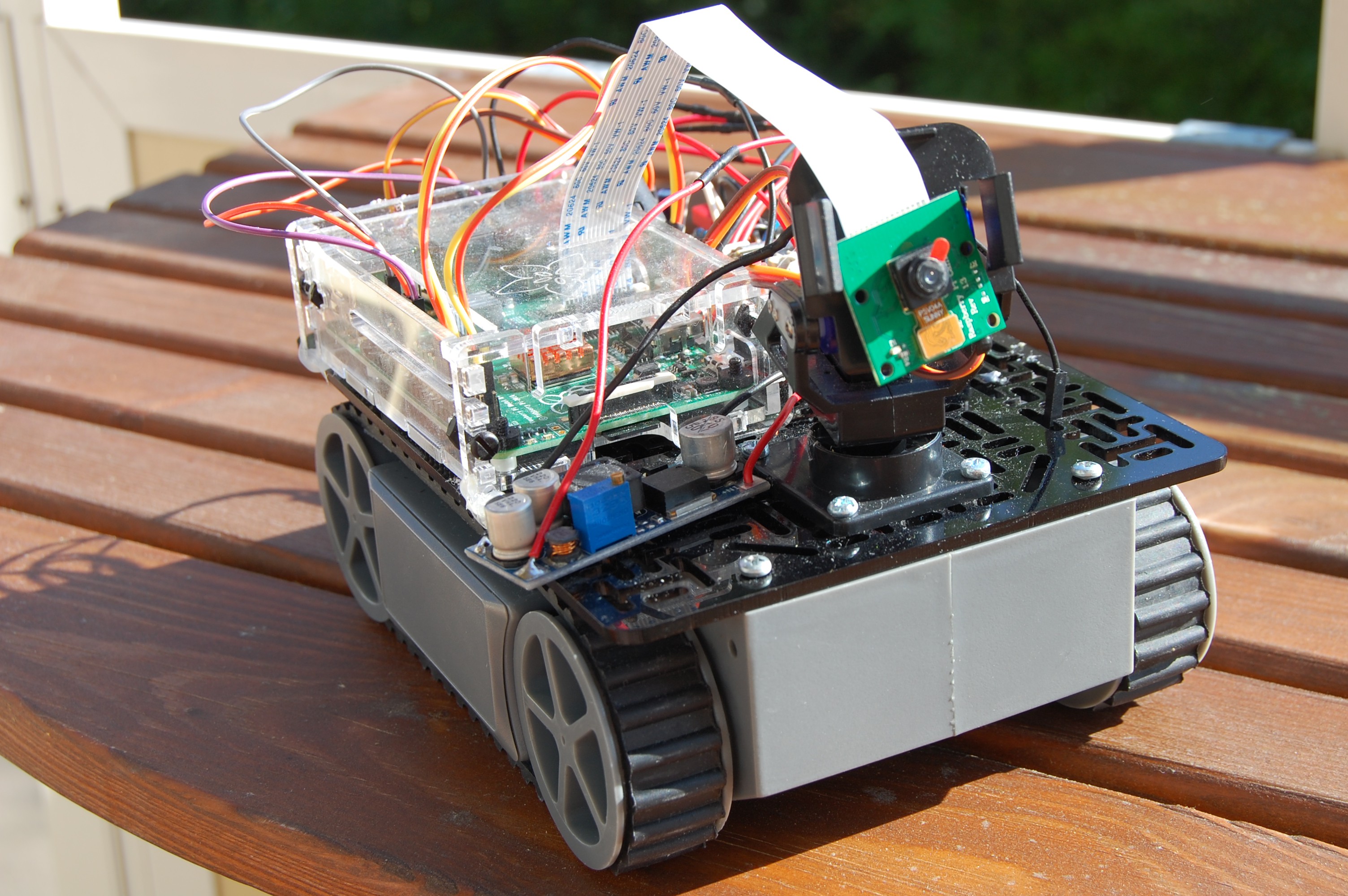
PiBot
A raspberry pi based robot using the raspberry pi camera and opencv for image processing.
 Dennis Johansson
Dennis JohanssonBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Marcelo Valeria
Marcelo Valeria
 Víctor Mayoral Vilches
Víctor Mayoral Vilches
 Max.K
Max.K
 ACROBOTIC Industries
ACROBOTIC Industries
Nice project Dennis! ^^