 Everett Bradford
Everett BradfordHere's an intro video with an autonomous hover demo:
Update 7/21: first test with on-board radar:
A system using sonar (and other sensors) to automatically maintain altitude on a quadcopter without affecting other functions
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.

 J. Ian Lindsay
J. Ian Lindsay
 Matt Mills
Matt Mills
 Josh Stewart
Josh Stewart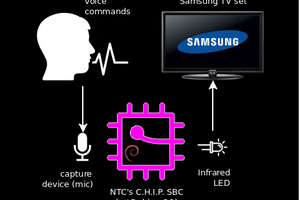
 Cassio Batista
Cassio Batista