 DeepSOIC
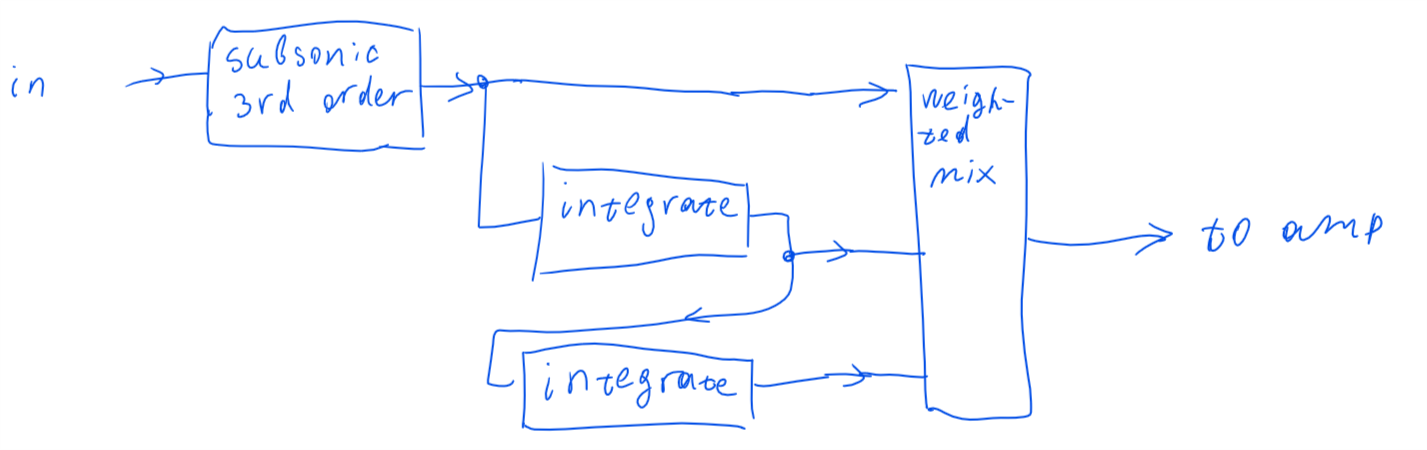
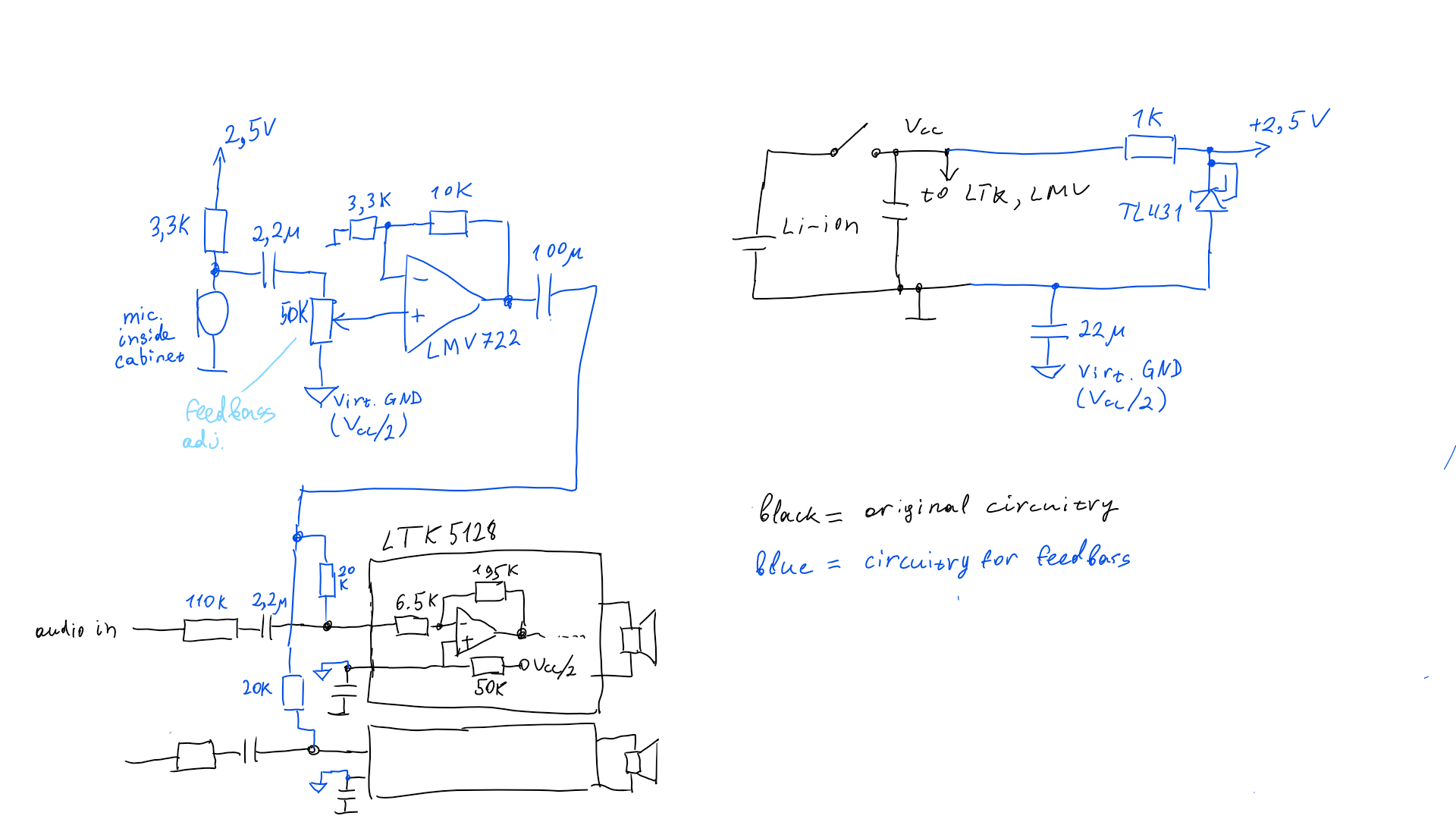
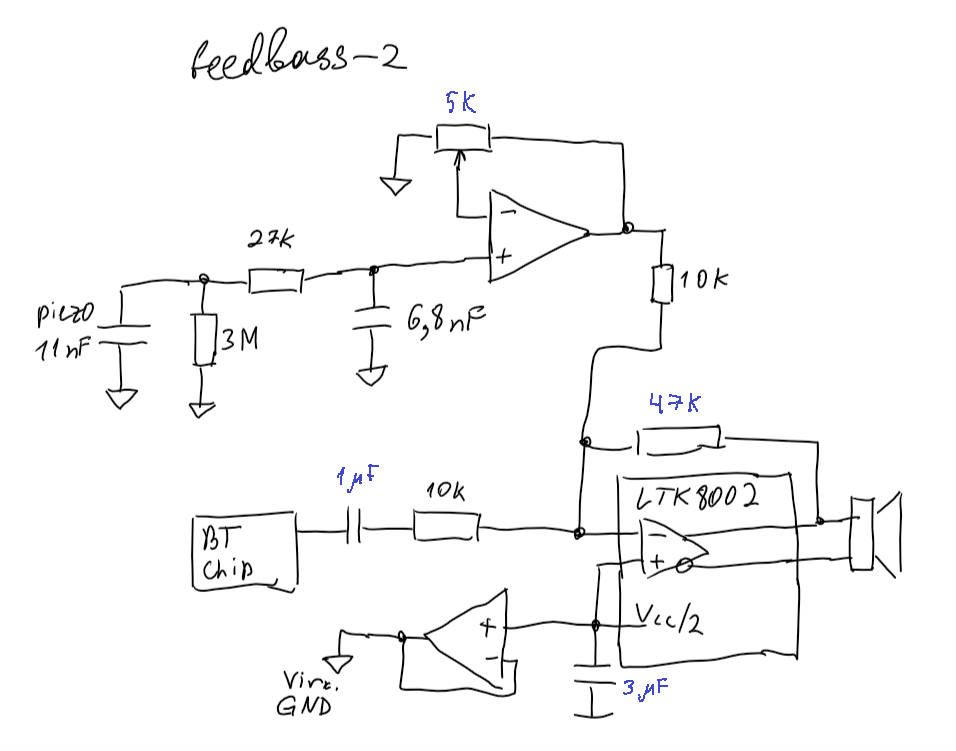
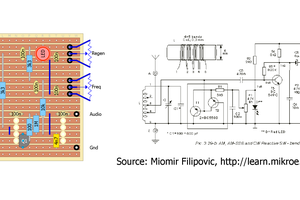
DeepSOICThe schematic.
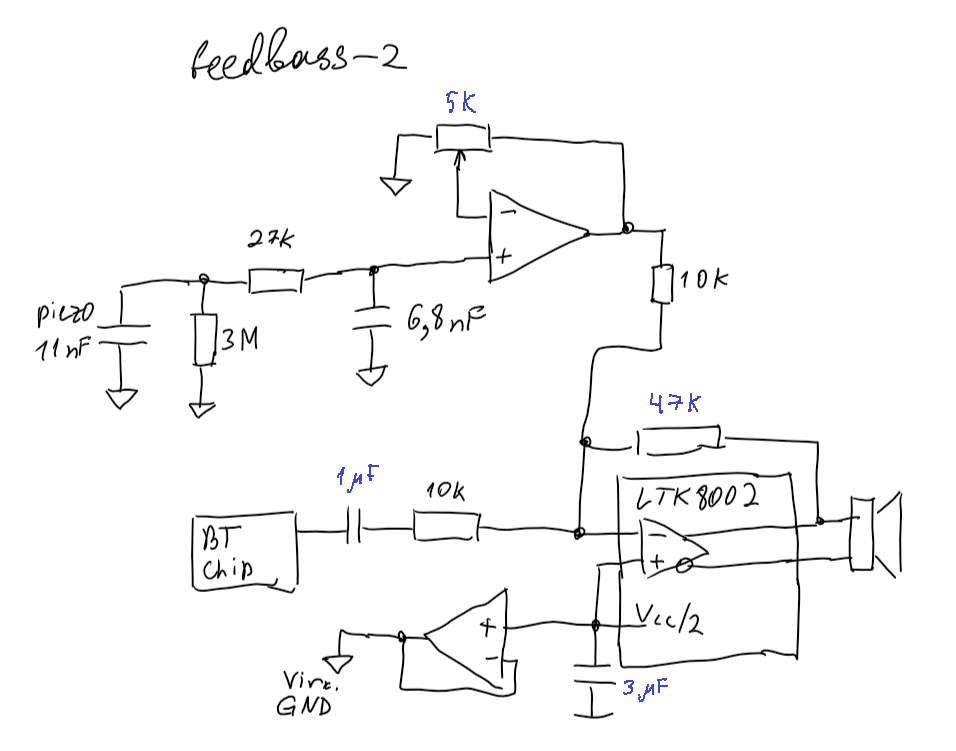
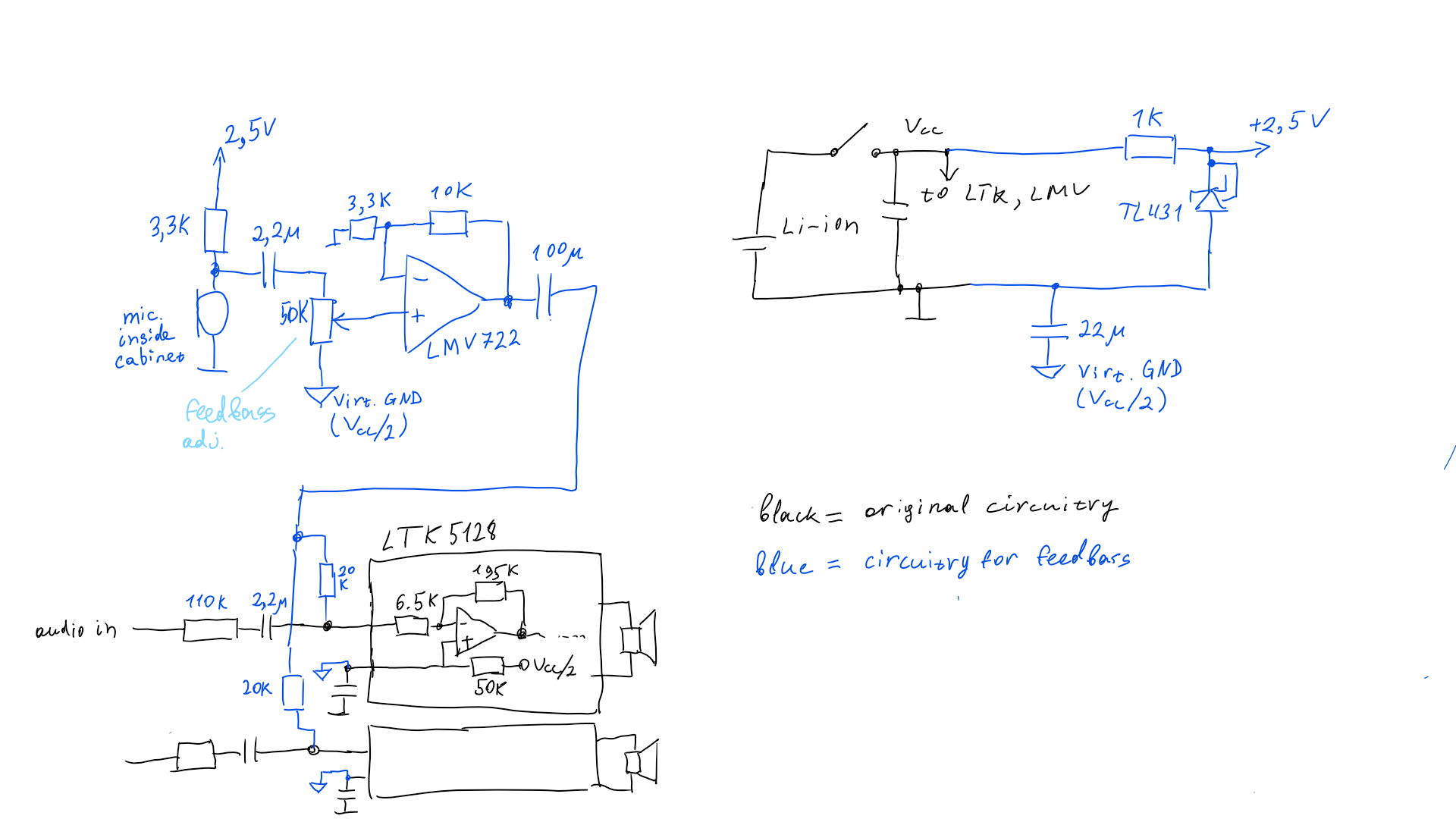 It's quite simple. Signal from microphone placed inside speaker enclosure is amplified and fed into the amplifier. If the feedback direction happens to be negative, it's easiest to swap driver polarity.
It's quite simple. Signal from microphone placed inside speaker enclosure is amplified and fed into the amplifier. If the feedback direction happens to be negative, it's easiest to swap driver polarity.The potentiometer adjusts the depth of microphone positive feedback, which changes the amount of bass boost. If it's adjusted too high, the system starts to self-oscillate. Back off a little bit till the oscillation is extinguished, and that is the setting for maximum possible bass boost.
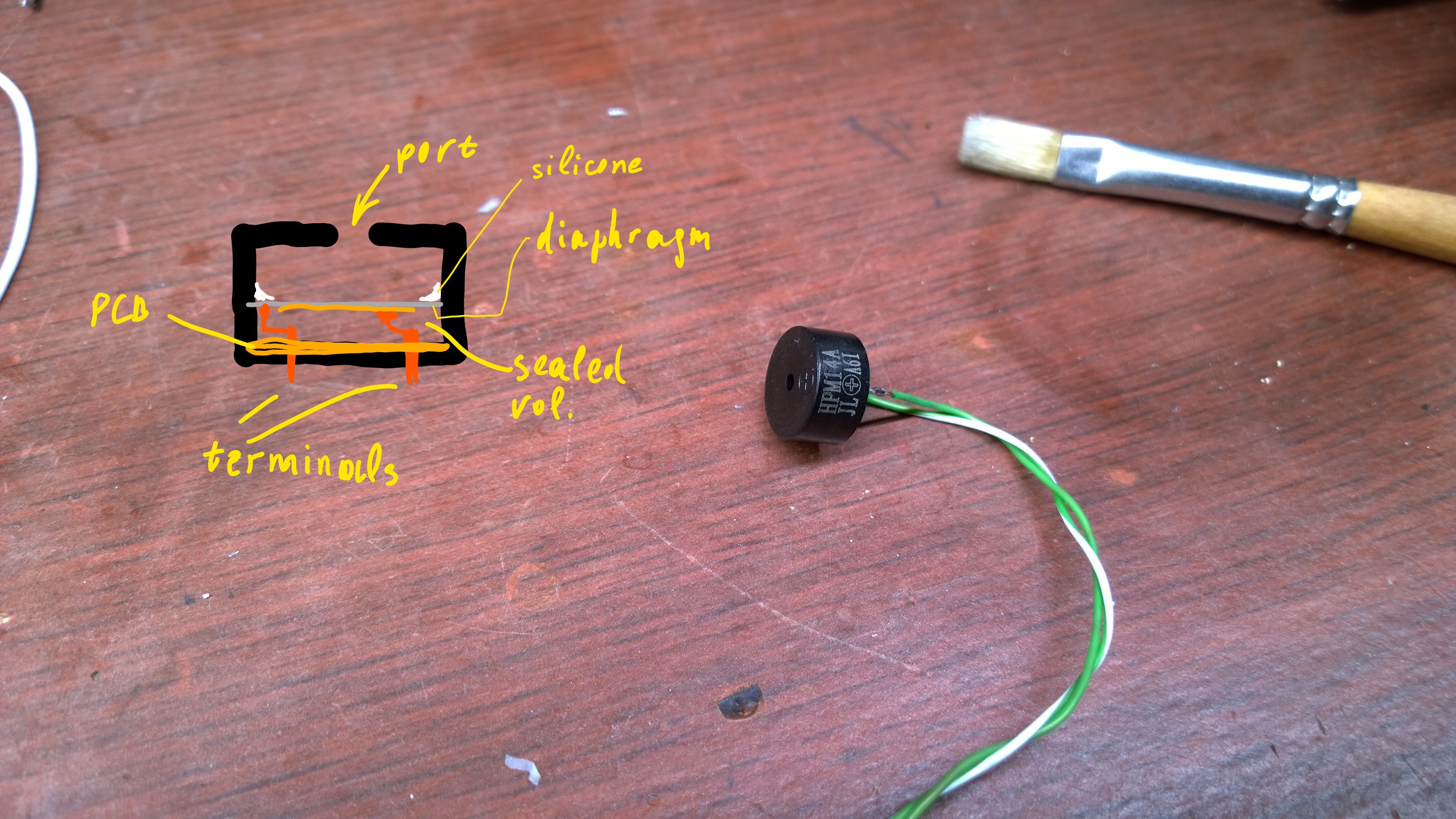
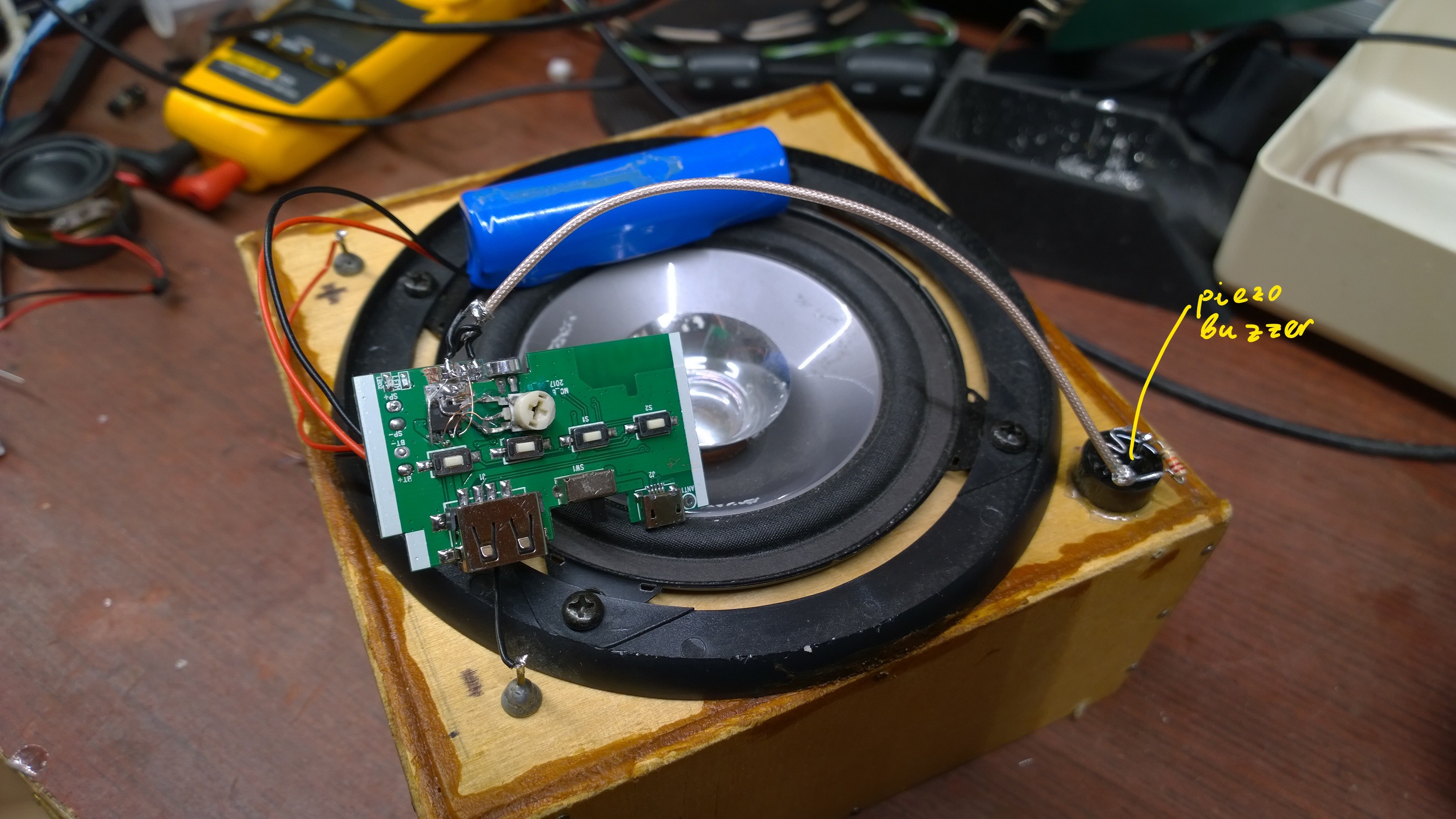
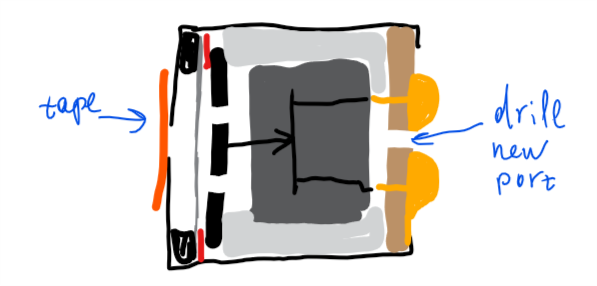
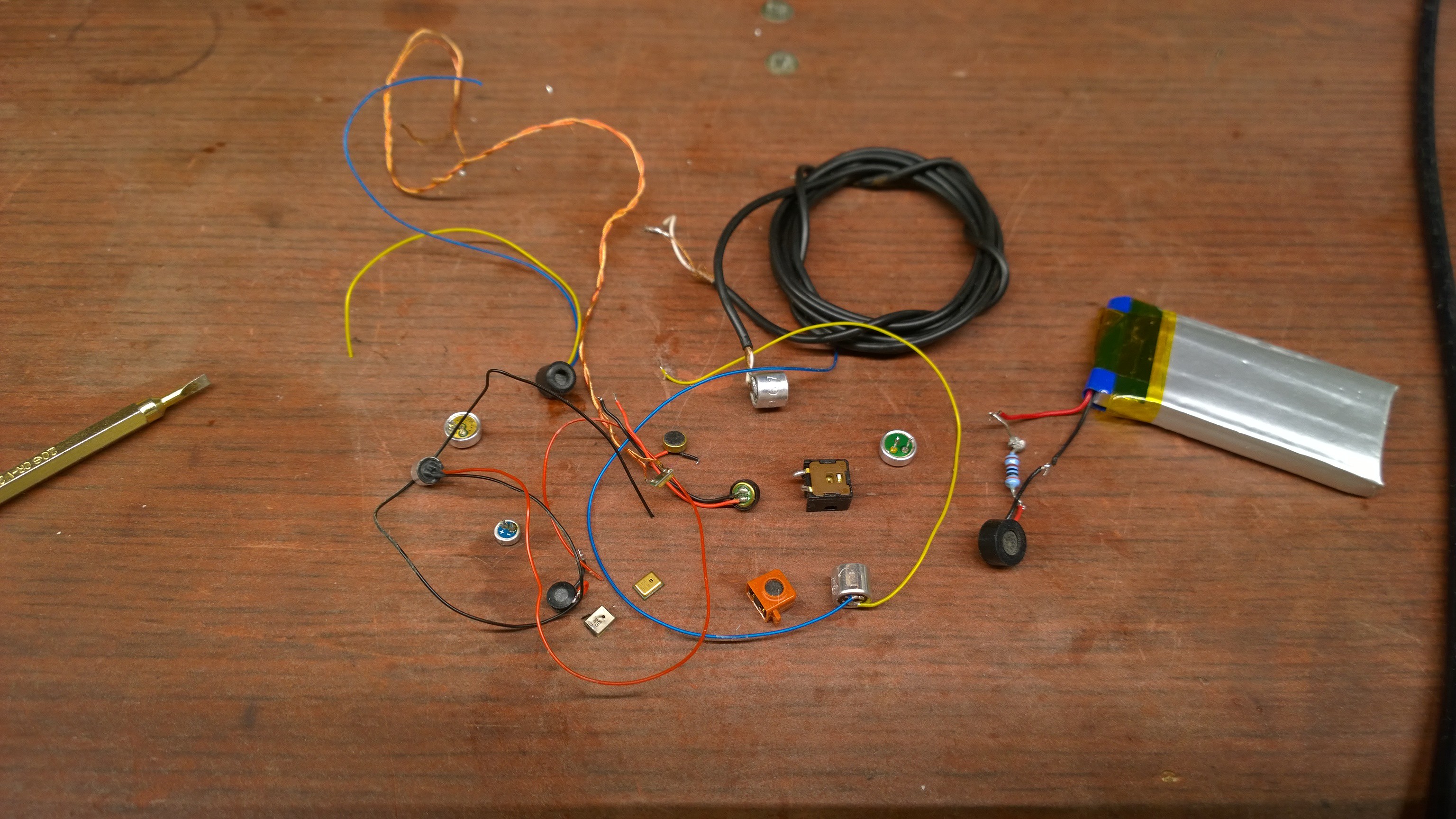
Not any microphone will do. The microphone should have very flat frequency response in bass range of interest, and perfect phase response as well. The microphone must also be able to handle high sound loudness, in my case it was 147 db (470 Pa of sound pressure, RMS). First I hacked a standard microphone to reduce its sensitivity and extend frequency response. It is tricky. Later I found out some piezoelectric buzzers do the job.
The enclosure must be well sealed. I'm not sure what will happen if it has passive subwoofer or a bass-reflex port. My system had a passive subwoofer originally, I have removed it.
The results are not exactly what I wanted, but it does give a good amount of pleasant deep bass. See frequency response change in project logs.
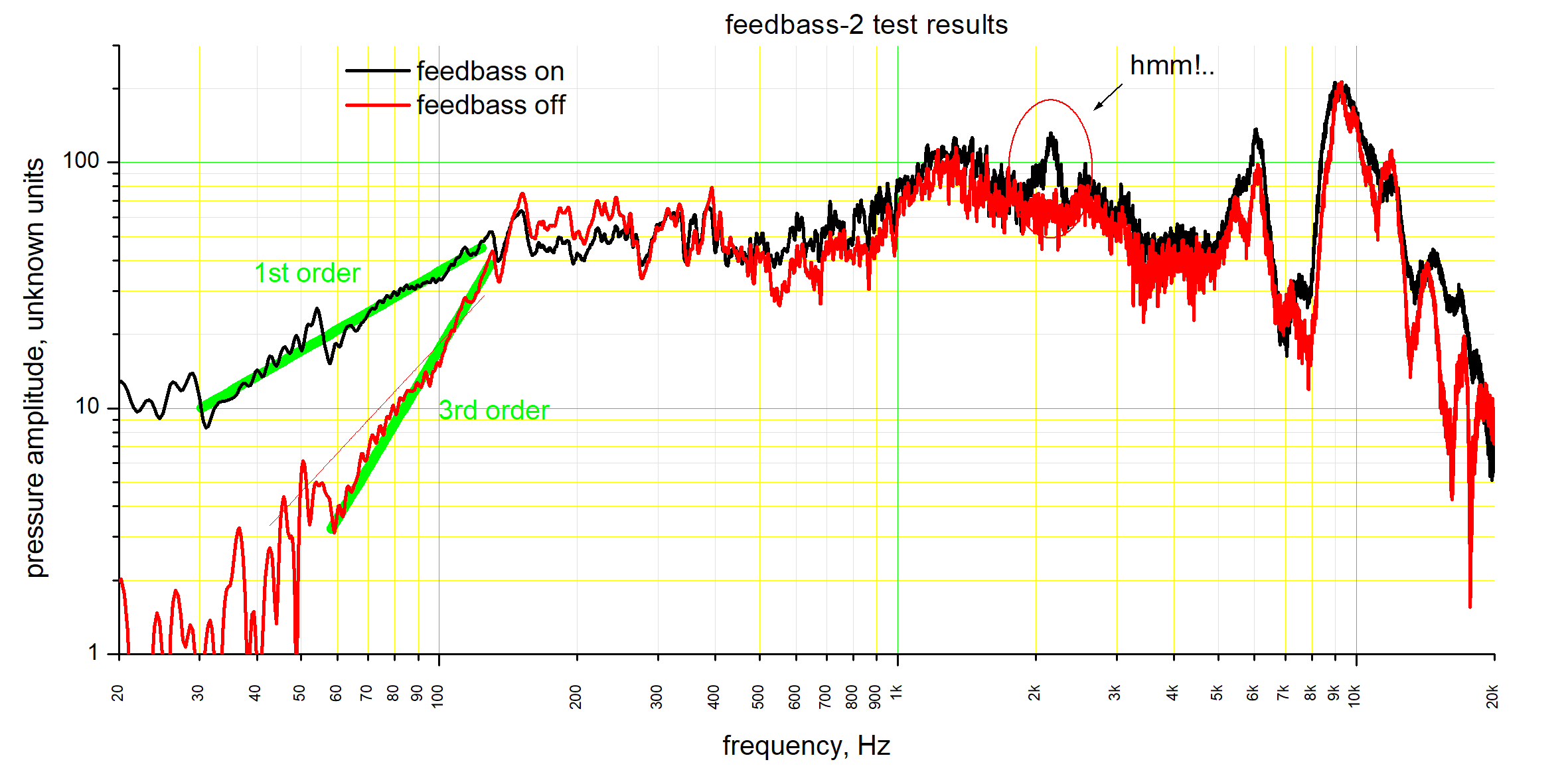
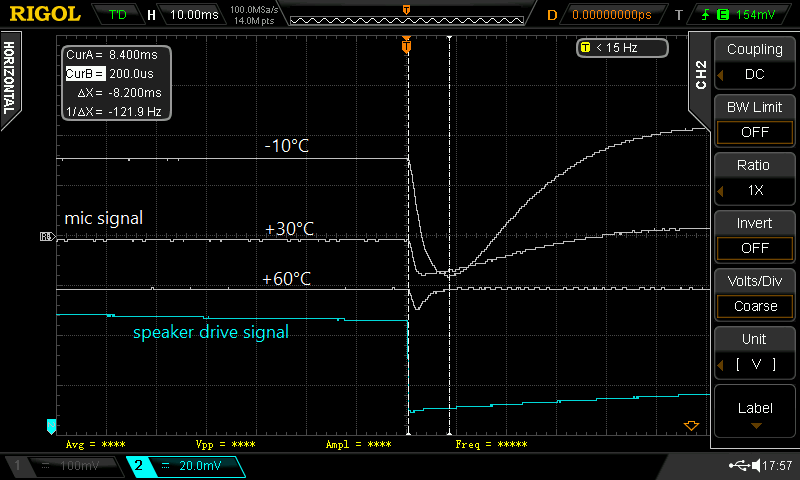
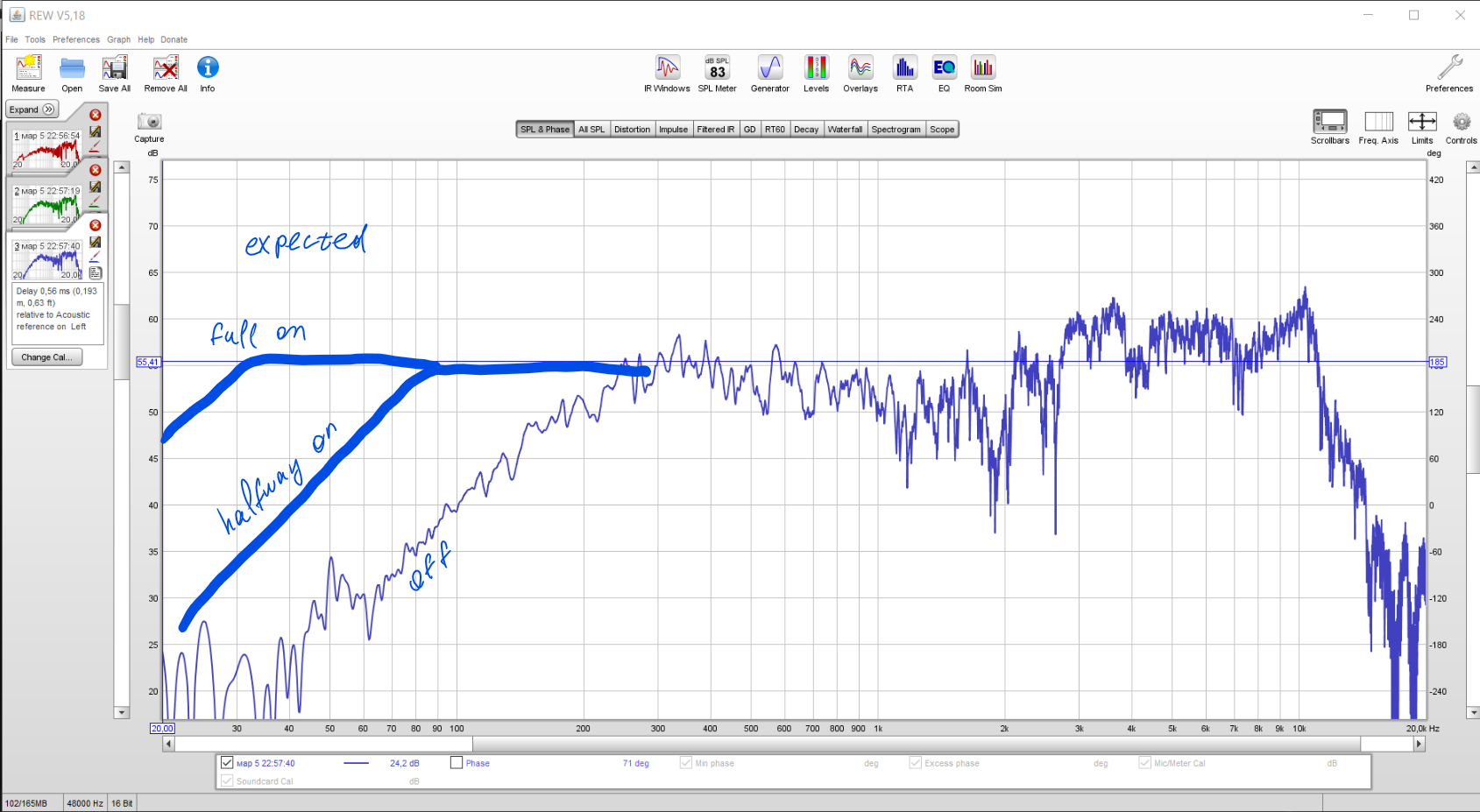 And of course... it's not really what happens. This is what I measure:
And of course... it's not really what happens. This is what I measure: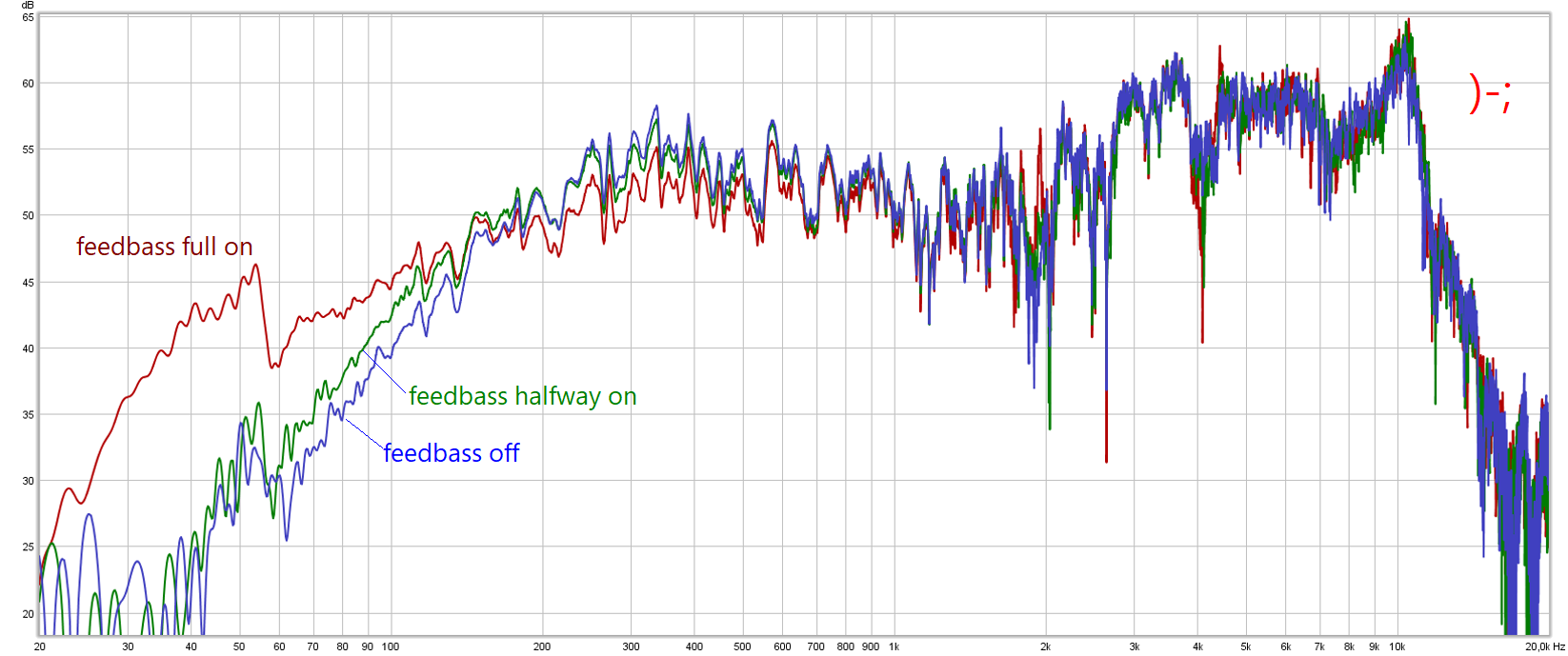
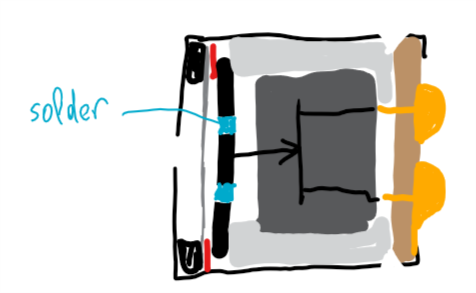
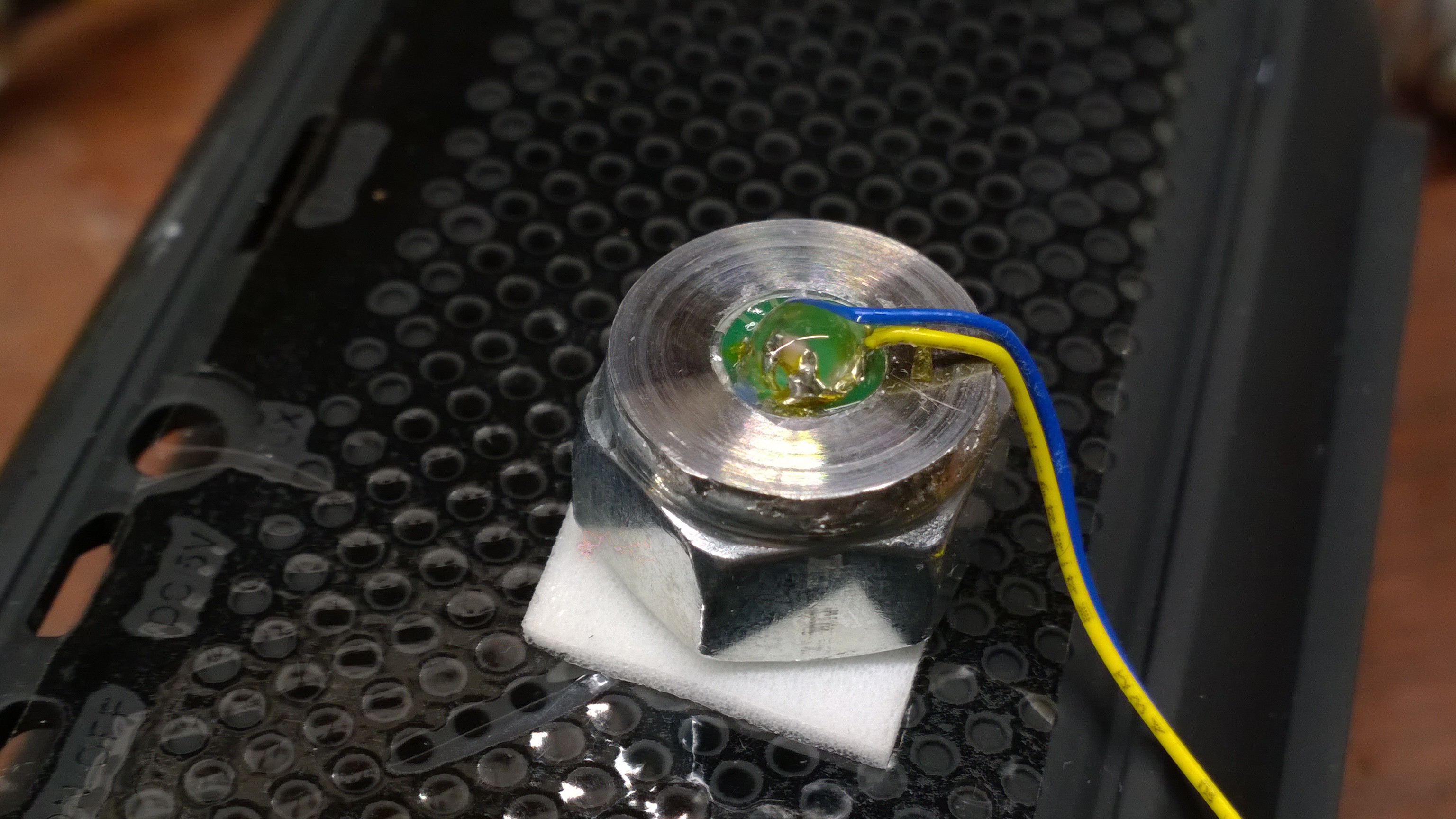
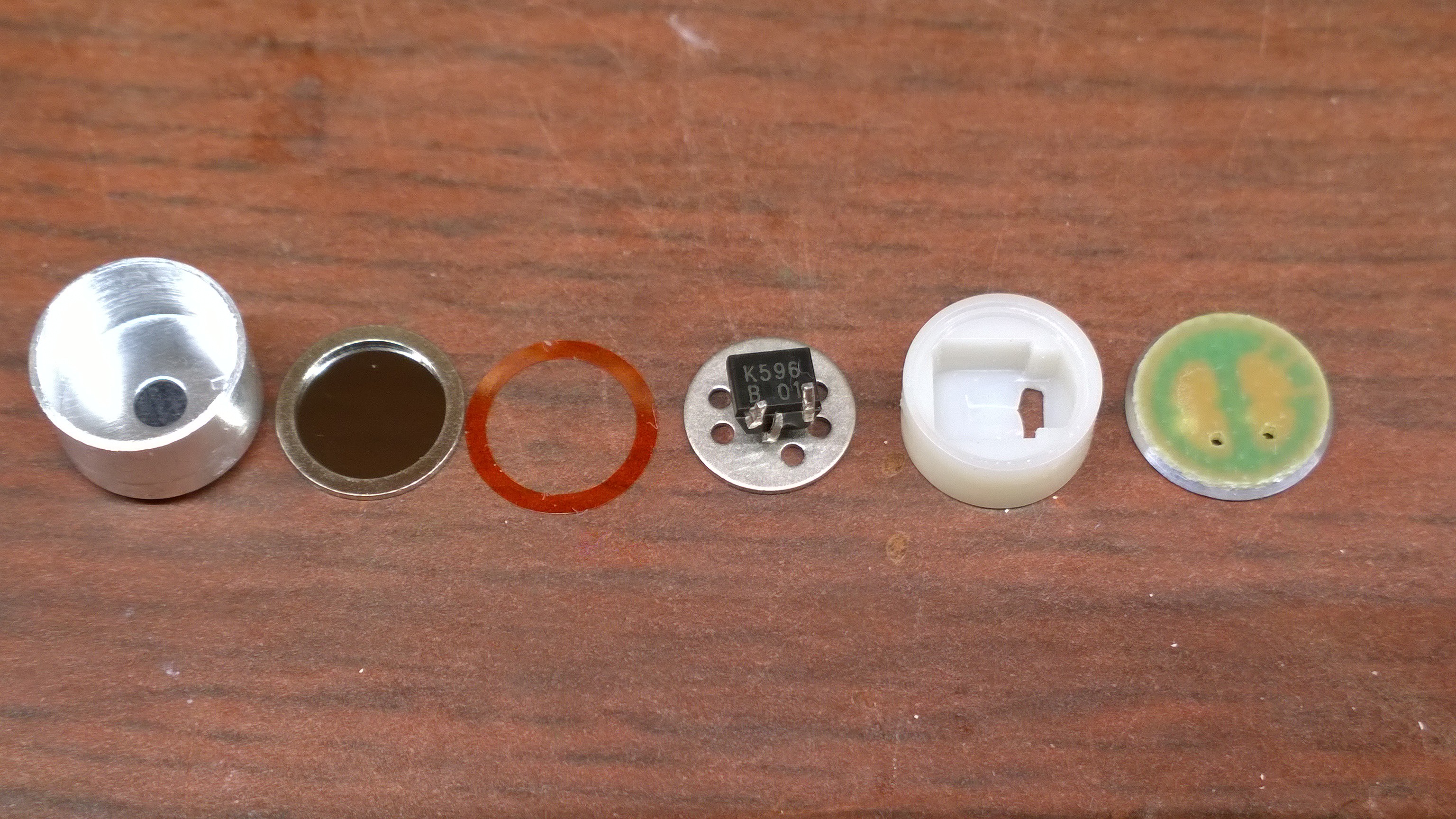
 And to put the microphone back together, I turned a capsule from a nut and a bolt:
And to put the microphone back together, I turned a capsule from a nut and a bolt: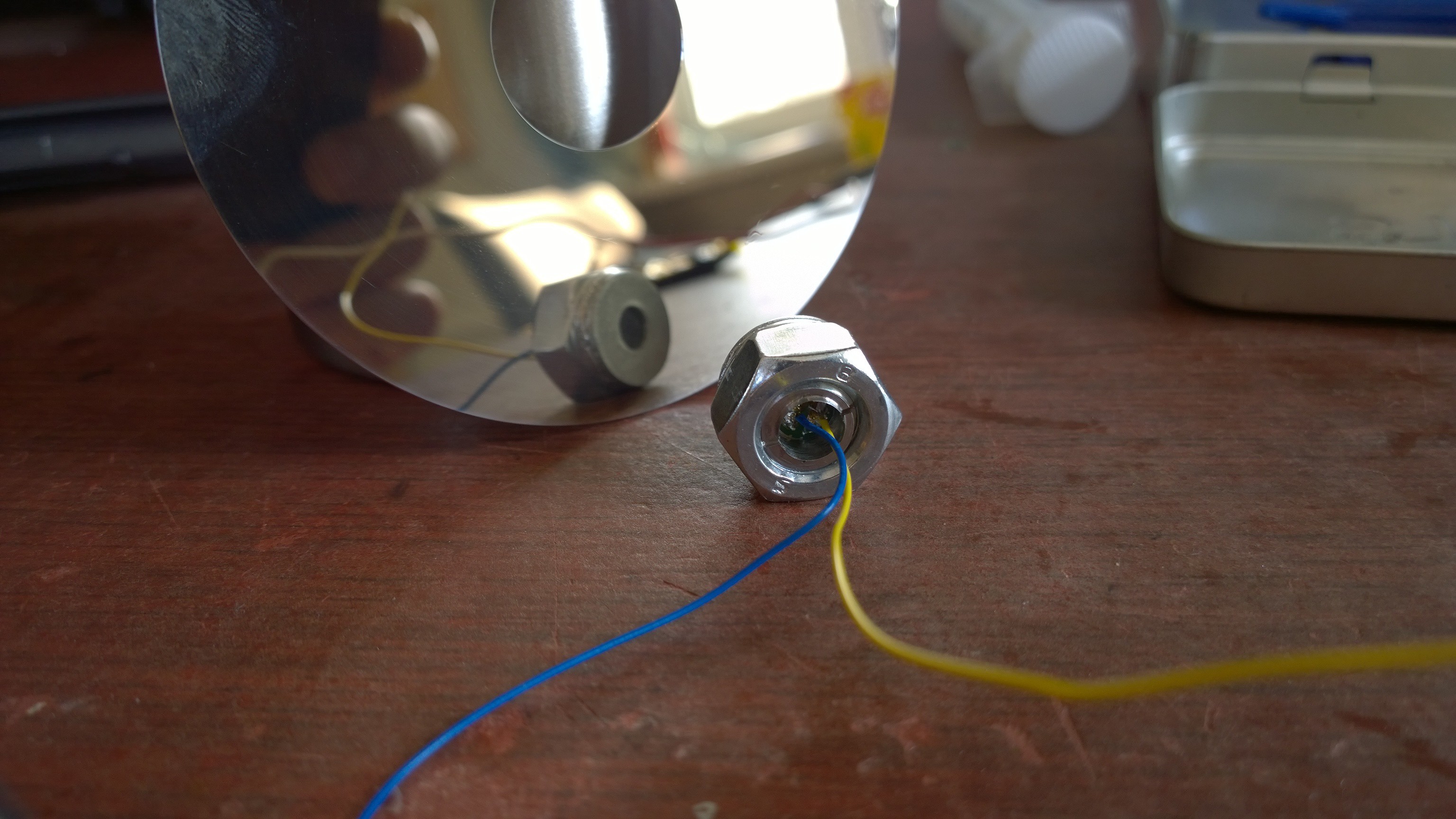 So now I can easily take it apart and put it back together as many times as I like.
So now I can easily take it apart and put it back together as many times as I like.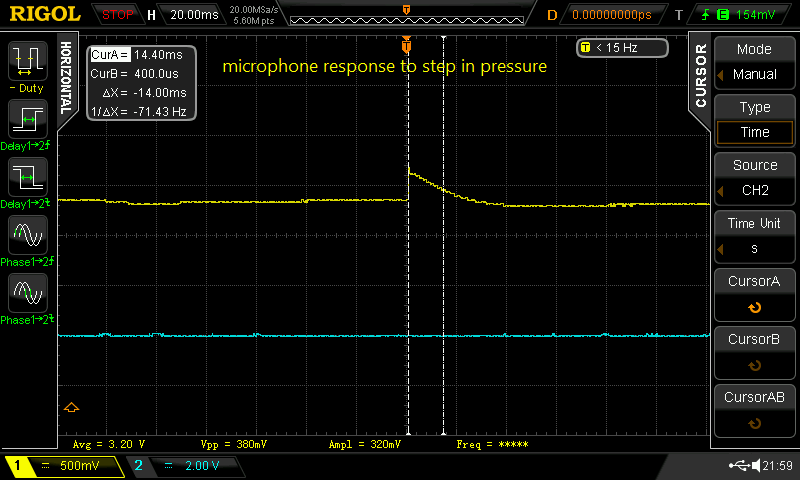 And that is something that took me a long long time to figure out. Because I didn't go straight to testing step response. I just tested it at 40 Hz sine wave as before, verified that the sensitivity is just right, and went straight to making circuit. That circuit did do something, and the speaker was giving out some very nice sound. I assembled it into a nice portable thing, and took it with me the next day. To find out that outside, it went crazy and started to self-oscillate.
And that is something that took me a long long time to figure out. Because I didn't go straight to testing step response. I just tested it at 40 Hz sine wave as before, verified that the sensitivity is just right, and went straight to making circuit. That circuit did do something, and the speaker was giving out some very nice sound. I assembled it into a nice portable thing, and took it with me the next day. To find out that outside, it went crazy and started to self-oscillate. 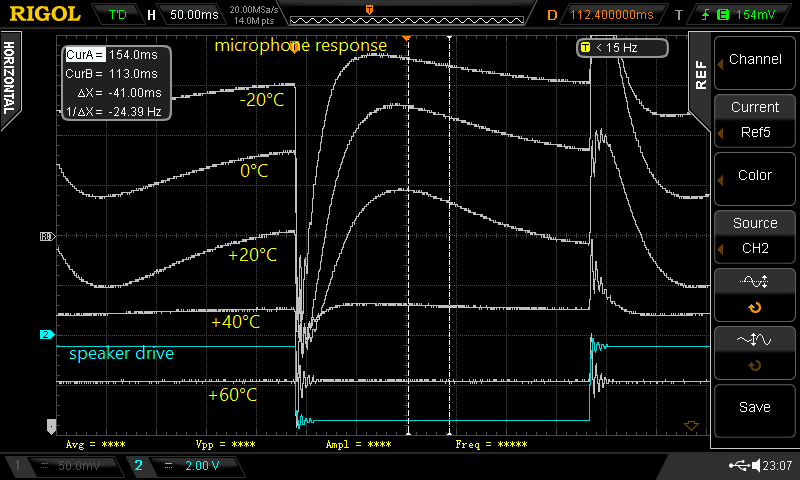
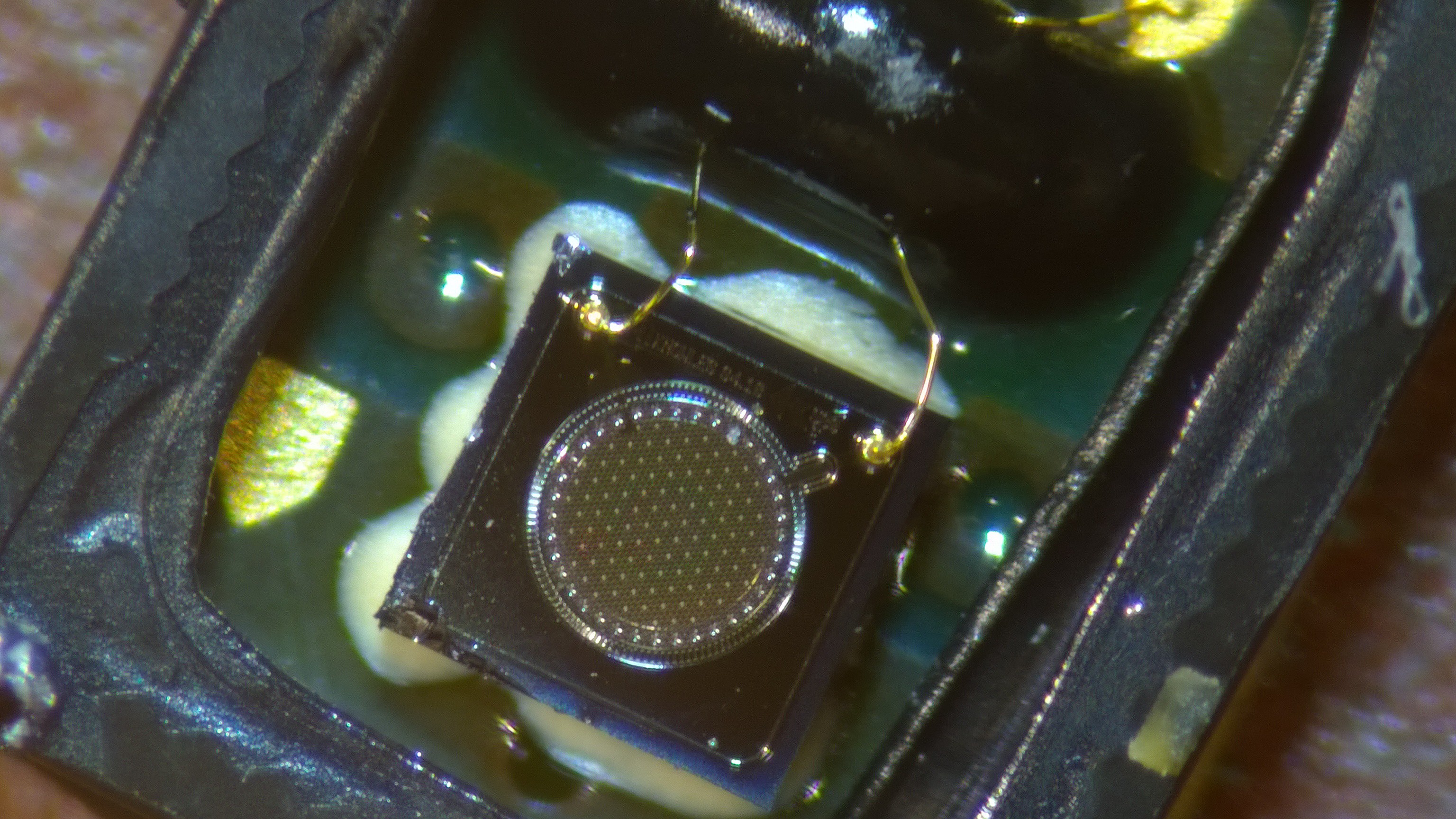
 That microphone response looks really weird...
That microphone response looks really weird...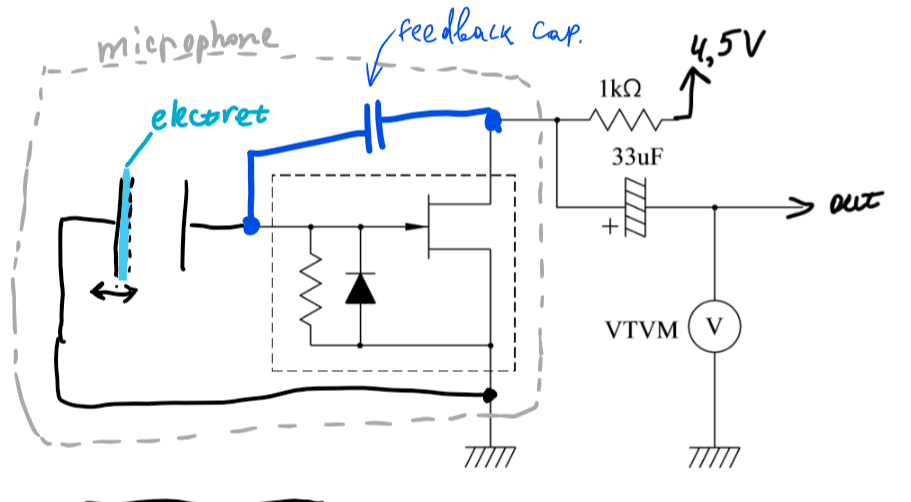
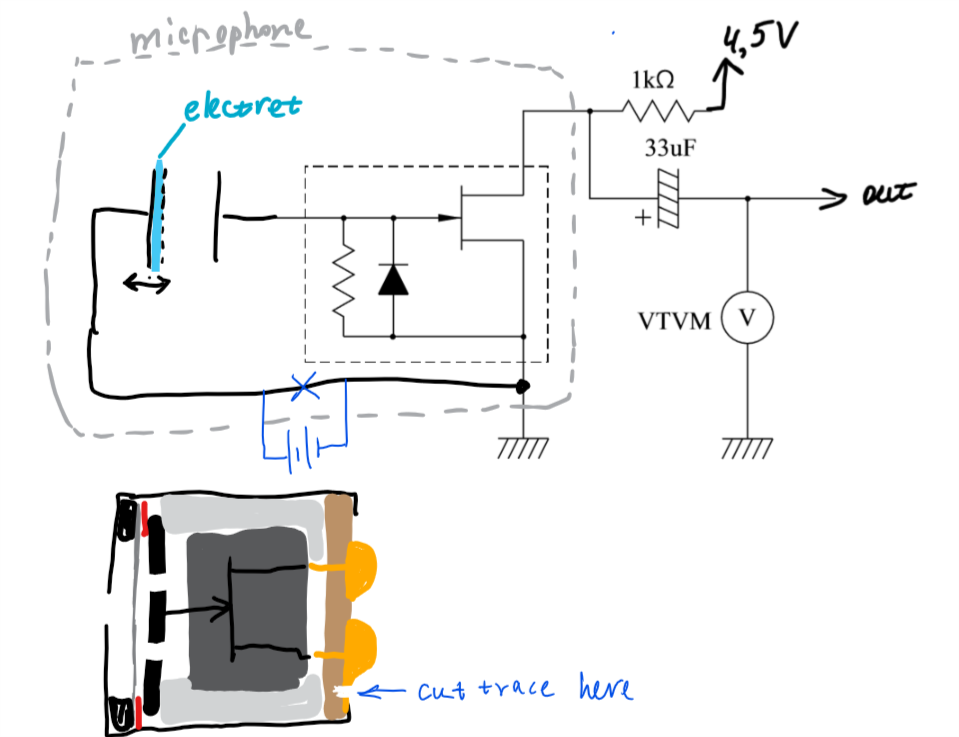

 As the sound wave passes by, it changes the air pressure outside of the microphone. The difference in pressures between outside and inside causes the diaphragm to bow, until the pressures are equalized (assuming the diaphragm is very flexible). The capacitor's capacitance changes, and because of the built-in electric field thanks to electret, some voltage appears on the capacitor. That change is amplified by the jfet.
As the sound wave passes by, it changes the air pressure outside of the microphone. The difference in pressures between outside and inside causes the diaphragm to bow, until the pressures are equalized (assuming the diaphragm is very flexible). The capacitor's capacitance changes, and because of the built-in electric field thanks to electret, some voltage appears on the capacitor. That change is amplified by the jfet.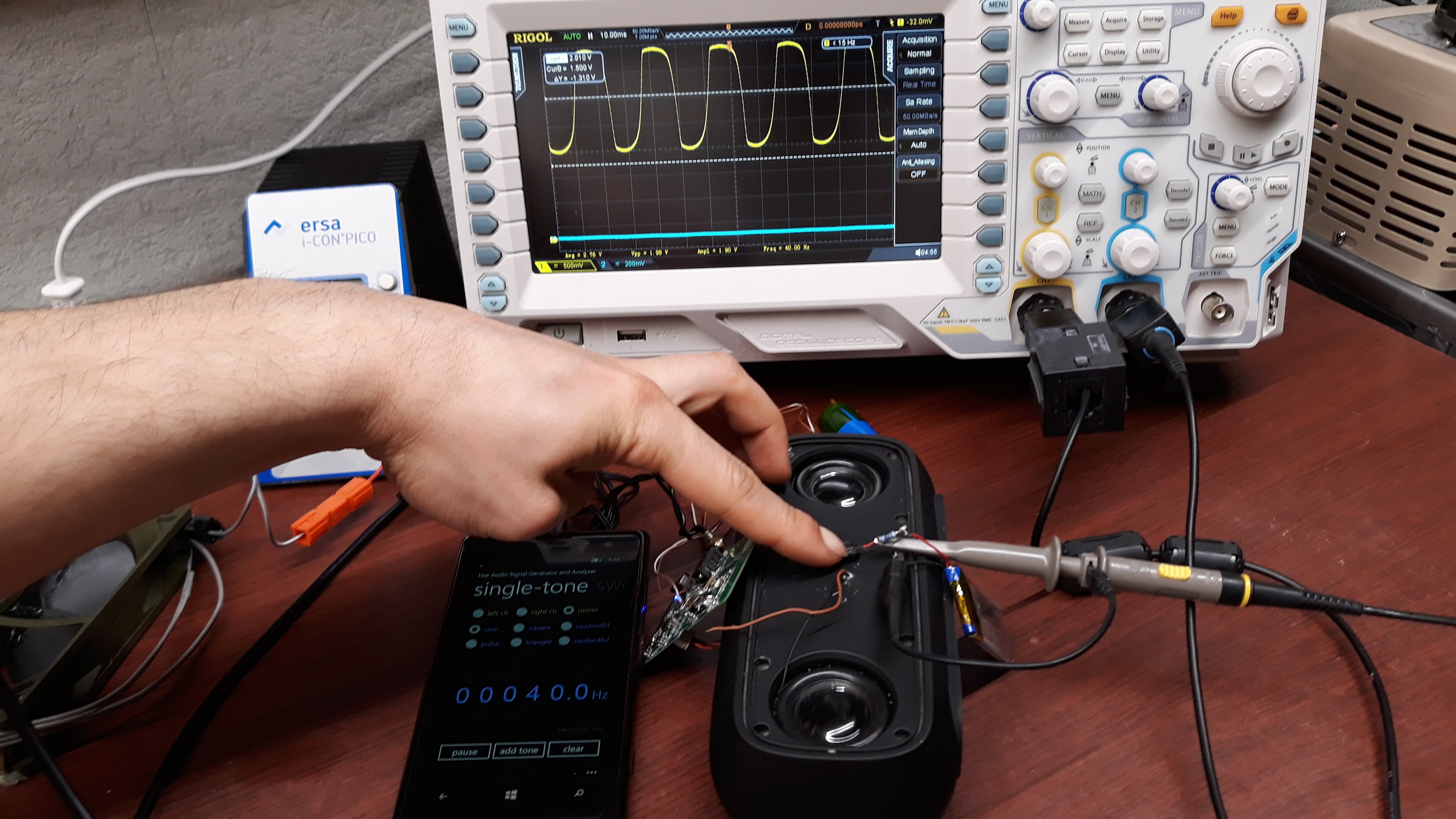



 agp.cooper
agp.cooper
 zaphod
zaphod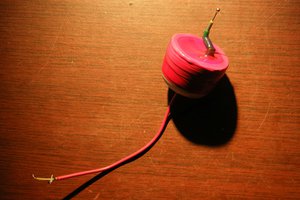
Thank you all for comments. Thanks to you, I added keywords "positional feedback" and "motional feedback", and now I can google up a lot of patents and some info on the subject. Before that, I couldn't find anything at all.