 David Prutchi
David PrutchiI completed the code for complete Stokes polarization analysis for DOLPi-MECH.
I have the camera aimed at my linear polarizer fan target. The two squares on the middle bottom are circular polarizers. This is how the scene looks without polarization-capable vision:

This is the linear RGB polarization encoding (my default real-time preview):

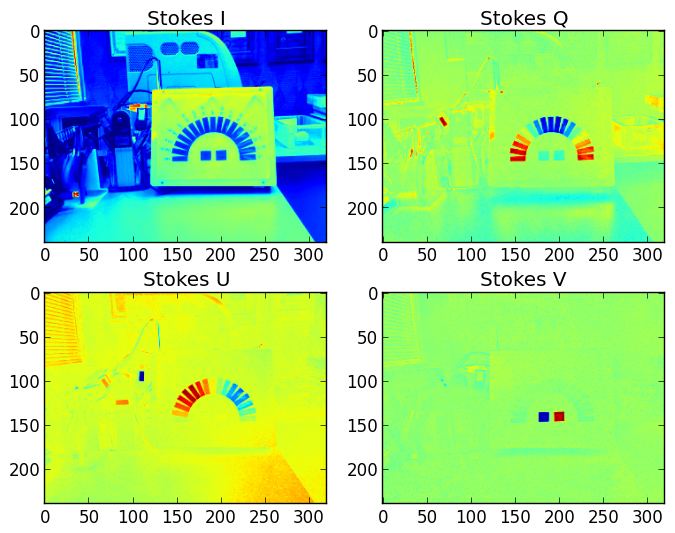
These are the complete Stokes parameters. Note that the last parameter (V) relates to circular polarization, correctly identifying the two circular polarizers and their handedness:
This is the polarization analysis:
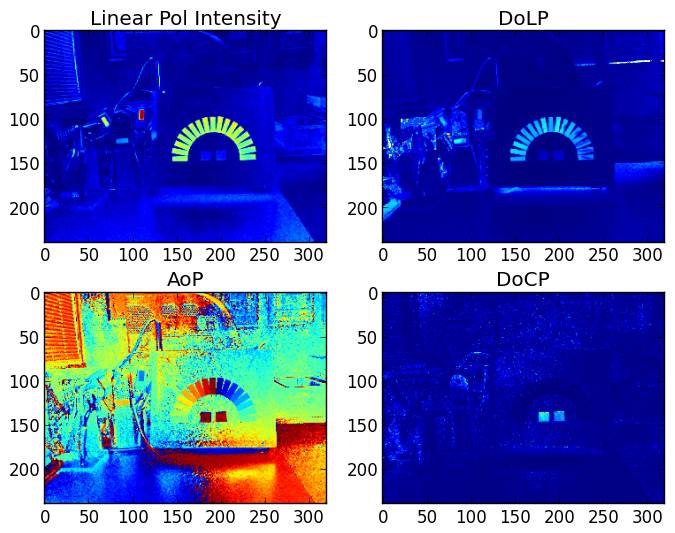
By coincidence, the penholder where I put my digital calipers was standing by the target, and the LCDs show brightly in the LPI image.
Finally, this is the Python code:
# DOLPiMechComplete.py
#
# This Python program demonstrates the DOLPi_Mech polarimetric camera.
#
# A servo motor rotates a polarization filter wheel in front of the
# Raspberry Pi camera. An Adafruit PWM Servo HAT drives the servo.
#
# (c) 2015 David Prutchi, Ph.D., licensed under MIT license
# (MIT, opensource.org/licenses/MIT)
#
#
#import the necessary packages
from picamera.array import PiRGBArray
from picamera import PiCamera
import time
import cv2
from Adafruit_PWM_Servo_Driver import PWM
import numpy as np
import matplotlib.pyplot as plt
def dispStokes(stokesI, stokesQ, stokesU, stokesV):
#Function dispStokes - Save and optionally display Stokes parameters
plt.figure("Stokes")
plt.subplot(2,2,1)
plt.imshow(stokesI)
plt.title("Stokes I")
#
plt.subplot(2,2,2)
plt.imshow(stokesQ)
plt.title("Stokes Q")
#
plt.subplot(2,2,3)
plt.imshow(stokesU)
plt.title("Stokes U")
#
plt.subplot(2,2,4)
plt.imshow(stokesV)
plt.title("Stokes V")
#
plt.savefig('Stokes.png',bbox_inches='tight')
plt.show(block=False)
def dispPol(polInt, polDoLP, polAoP, polDoCP):
#Function dispPol - Save and optionally display polarization parameters
plt.figure("pol")
plt.subplot(2,2,1)
plt.imshow(polInt)
plt.title("Linear Pol Intensity")
#
plt.subplot(2,2,2)
plt.imshow(polDoLP)
plt.title("DoLP")
#
plt.subplot(2,2,3)
plt.imshow(polAoP)
plt.title("AoP")
#
plt.subplot(2,2,4)
plt.imshow(polDoCP)
plt.title("DoCP")
#
plt.savefig('polarization.png',bbox_inches='tight')
plt.show(block=False)
# Initialise the Adafruit PWM HAT using the default address
pwm = PWM(0x40)
pwm.setPWMFreq(60) # Set PWM frequency to 60 Hz
servoMin = 180 # Min pulse length out of 4096
servoMax = 615 # Max pulse length out of 4096
# Servo PWM values for different filter wheel positions
servoNone = 615 # PWM setting for open window
servo0=541 # PWM setting for 0 degree filter
servo90=468 # PWM setting for 90 degree filter
servo45=395 # PWM setting for 45 degree filter
servo135=321 # PWM setting for -45 degree (=135 degree) filter
servoLHCP=247 # PWM setting for LHCP filter
servoRHCP=180 # PWM setting for RHCP filter
#Raspberry Pi Camera Initialization
#----------------------------------
#Initialize the camera and grab a reference to the raw camera capture
camera = PiCamera()
camera.resolution = (320, 240)
#camera.resolution = (640, 480)
#camera.resolution = (1280,720)
camera.framerate=30
rawCapture = PiRGBArray(camera)
camera.led=False
#Auto-Exposure Lock
#------------------
# Wait for the automatic gain control to settle
time.sleep(2)
# Now fix the values
camera.shutter_speed = camera.exposure_speed
camera.exposure_mode = 'off'
gain = camera.awb_gains
camera.awb_mode = 'off'
camera.awb_gains = gain
#Initialize flags
loop=True #Initial state of loop flag
first=False #Flag to skip display during first loop
video=False #Use video port? Video is faster, but image quality is significantly
#lower than using still-image capture
while loop:
#grab an image from the camera with no filter
pwm.setPWM(0, 0, servoNone)
time.sleep(0.5)
rawCapture.truncate(0)
camera.capture(rawCapture, format="bgr",use_video_port=video)
imageNone=rawCapture.array
#grab an image from the camera with linear polarizer at 0 degrees
pwm.setPWM(0, 0, servo0)
time.sleep(0.1) #Wait for filter wheel to moves
rawCapture.truncate(0)
camera.capture(rawCapture, format="bgr",use_video_port=video)
image0=cv2.cvtColor(rawCapture.array,cv2.COLOR_BGR2GRAY)
#grab an image from the camera with linear polarizer at 90 degrees
pwm.setPWM(0, 0, servo90)
time.sleep(0.1)
rawCapture.truncate(0)
camera.capture(rawCapture, format="bgr",use_video_port=video)
image90=cv2.cvtColor(rawCapture.array,cv2.COLOR_BGR2GRAY)
#grab an image from the camera with linear polarizer at 45 degrees
pwm.setPWM(0, 0, servo45)
time.sleep(0.1)
rawCapture.truncate(0)
camera.capture(rawCapture, format="bgr",use_video_port=video)
image45=cv2.cvtColor(rawCapture.array,cv2.COLOR_BGR2GRAY)
#grab an image from the camera with linear polarizer at -45 degrees (=135 degrees)
pwm.setPWM(0, 0, servo135)
time.sleep(0.1)
rawCapture.truncate(0)
camera.capture(rawCapture, format="bgr",use_video_port=video)
image135=cv2.cvtColor(rawCapture.array,cv2.COLOR_BGR2GRAY)
#grab an image from the camera with LHCP filter
pwm.setPWM(0, 0, servoLHCP)
time.sleep(0.1)
rawCapture.truncate(0)
camera.capture(rawCapture, format="bgr",use_video_port=video)
imageLHCP=cv2.cvtColor(rawCapture.array,cv2.COLOR_BGR2GRAY)
#grab an image from the camera with RHCP filter
pwm.setPWM(0, 0, servoRHCP)
time.sleep(0.1)
rawCapture.truncate(0)
camera.capture(rawCapture, format="bgr",use_video_port=video)
imageRHCP=cv2.cvtColor(rawCapture.array,cv2.COLOR_BGR2GRAY)
#convert images to signed double (int16)
image0_d=np.int16(image0)
image90_d=np.int16(image90)
image45_d=np.int16(image45)
image135_d=np.int16(image135)
imageLHCP_d=np.int16(imageLHCP)
imageRHCP_d=np.int16(imageRHCP)
#calculate Stokes parameters
stokesI=image0_d+image90_d
stokesQ=image0_d-image90_d
stokesU=image45_d-image135_d
stokesV=imageLHCP_d-imageRHCP_d
#calculate polarization parameters
polInt=np.sqrt(1+np.square(stokesQ)+np.square(stokesU)) #Linear Polarization Intensity
polDoLP=polInt/stokesI #Degree of Linear Polarization
polAoP=0.5*(np.arctan2(stokesU,stokesQ)) #Angle of Polarization
polDoCP=(2*np.absolute(stokesV))/polInt #Degree of Circular Polarization
#prepare DOLPi RGB image
R=image0
B=image90
G=image45
imageDOLPi=cv2.merge([B,G,R])
cv2.imshow("Image_DOLPi",imageDOLPi) #Display DOLPi preview image
#cv2.imshow("Image_DOLPi",cv2.resize(imageDOLPi,(320,240),interpolation=cv2.INTER_AREA)) #Display DOLP image
k = cv2.waitKey(1) #Check keyboard for input
if k == ord('x'): # wait for x key to exit
loop=False
# Save and Prepare to leave
# -------------------------
#
pwm.setPWM(0, 0, servoNone) #return filter wheel to no-filter position
#display and save calculated polarization parameters
dispStokes(stokesI, stokesQ, stokesU, stokesV)
dispPol(polInt, polDoLP, polAoP, polDoCP)
#save images
cv2.imwrite("imageNone.jpg",imageNone)
cv2.imwrite("image0.jpg",image0)
cv2.imwrite("image90.jpg",image90)
cv2.imwrite("image45.jpg",image45)
cv2.imwrite("image135.jpg",image135)
cv2.imwrite("imageLHCP.jpg",imageLHCP)
cv2.imwrite("imageRHCP.jpg",imageRHCP)
cv2.imwrite("RGBpol.jpg",cv2.merge([B,G,R]))
#exit
time.sleep(10)
cv2.destroyAllWindows()
quit
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hi, David. I tried to run your code, but I keep getting RuntimeWarning: invalid value encountered in sqrt
Why is that? I tried to understand why but I can't find any answer by myself, so I thought I could reach a conclusion through you.
The camera worked well, the motor also spun well, but the error always pops up, thus not showing any Stokes analysis and I can't save any images.
Thank you in advance!
Are you sure? yes | no